EtherCAT Programming Guide EtherCAT Operation Example
March, 2017 3-17
3
(2) Set Node ID and Slot ID for the servo drive and enable motion status display
Figure 3.5.2.2
Select Node ID and Slot ID and check the Timer box to display the motion status.
Set NodeID: Specify the node ID to be executed. The parameters “AxisNo.” and “SlotNo”
in the API function.
Timer: Check the Timer box to display the current motion status.
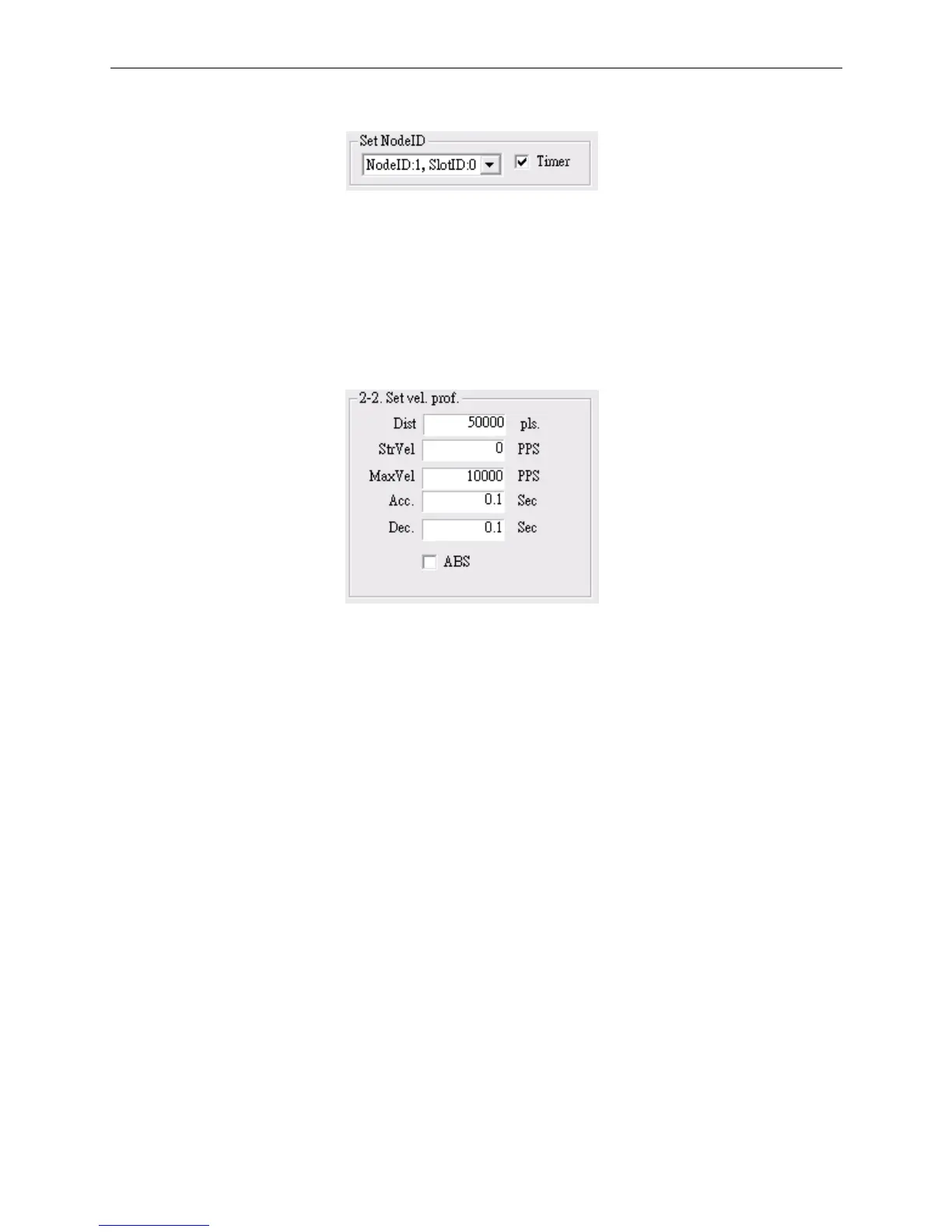
(3) Enter the parameter for motion control
Figure 3.5.2.3
Dist.: Input the moving distance. The parameter “Dist” in the API function.
StrVel.: Input the initial speed. The parameter “StrVel” in the API function.
*The servo drive accelerates to the initial speed set in StrVel at its max. speed. Then, it
accelerates to the constant speed set in MaxVel with the acceleration time set in Acc.
MaxVel.: Input the constant speed. The parameter “MaxVel” in the API function.
Acc.: Input the duration from initial speed to constant speed. The parameter “Tacc” in the
API function.
Dec.: Input the duration to decelerate from the constant speed to 0. The parameter “Tdec”
in the API function.
ABS.: Check this box to have the motion conducted according to the absolute coordinates
set in Dist.