EtherCAT Operation Example EtherCAT Programming Guide
3-22 March, 2017
3
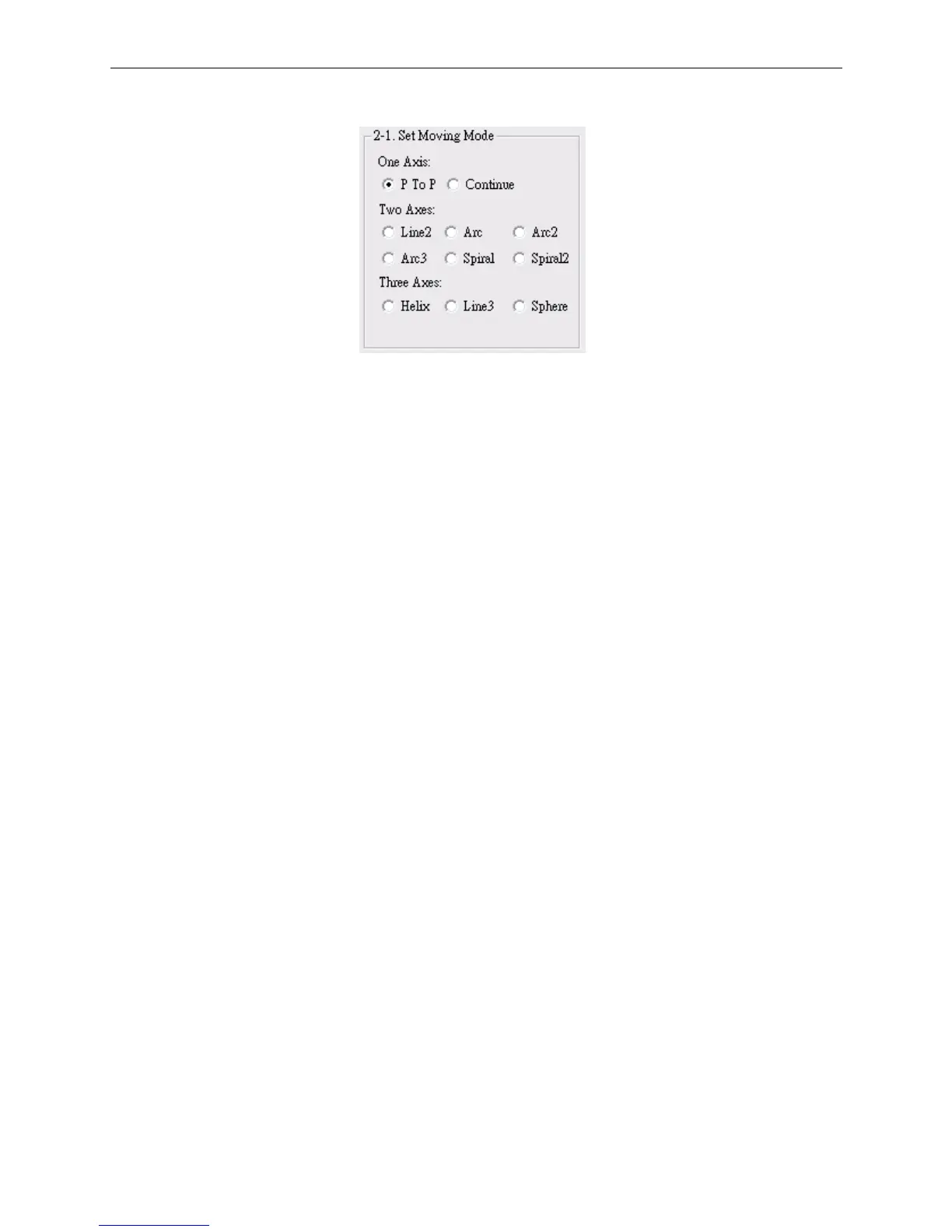
(3) Select the moving mode
Figure 3.6.2.2
Single-axis motion control:
P To P: Point to point movement
Continue: Linear movement
Two-axis motion control:
Line2: Linear interpolation control
Arc: Type 1 arc interpolation control (with the known circle center and angle)
Arc2: Type 2 arc interpolation control (with the known end point and angle)
Arc3: Type 3 arc interpolation control (with the known circle center and end point)
Spiral: Type 1 spiral interpolation control (with the known circle center and angle)
Spiral2: Type 2 spiral interpolation control (with the known end point and circle
number)
Three-axis motion control:
Helix: Helical interpolation control
Line3: Linear interpolation control
Sphere: Three-axis sphere motion control