EtherCAT Programming Guide EtherCAT Operation Example
March, 2017 3-29
3
(15) Select Spiral2 for two-axis arc motion control (end point and circles).
Press the ← or → key (as shown in figure 3.6.2.4) to execute the following program:
RetCode = _ECAT_Slave_CSP_Start_Spiral2_Move(gESCCardNo, gNodeID, gSlotID,
CenPoint, EndPoint, CycleNum, Dir, StrVel, MaxVel, EndVel, Tacc, Tdec, gbIsSCurve,
gbIsABS);
// gblsSCurve
// 1: T-Curve
// 2: S-Curve
// gblsABS
// 0: Relative movement
// 1: Absolute movement
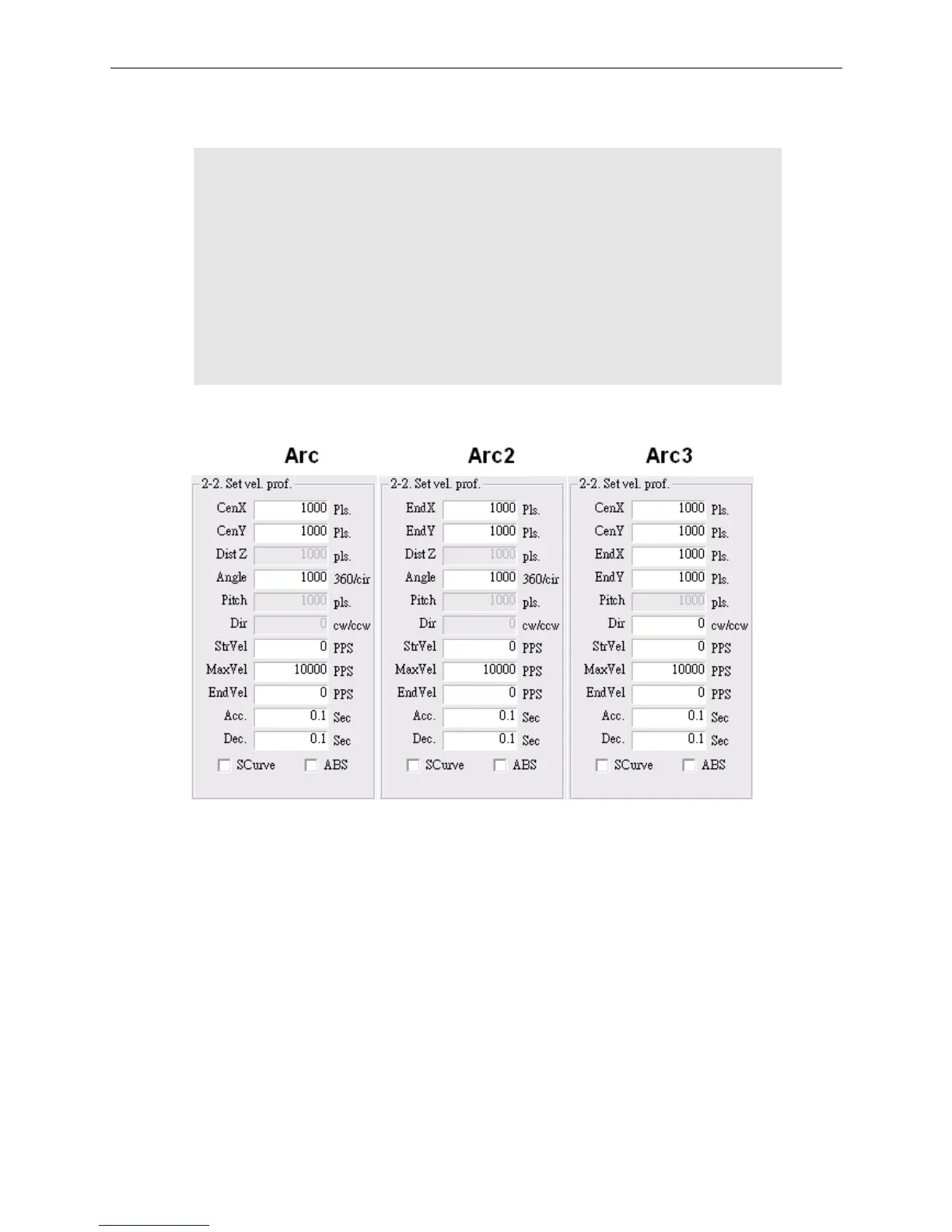
(16) Two-axis motion mode (Arc, Arc2, Arc3) and the settings
Figure 3.6.2.9
Arc parameter settings: Type 1 of arc interpolation (with the known arc’s circle center and
angle)
CenX: Input the X-coordinate of the circle center. The parameter “CenterPoint” in the API
function.
CenY: Input the Y-coordinate of the circle center. The parameter “CenterPoint” in the API
function.
Angle: Set the arc angle. The parameter “Angle” in the API function.
StrVel.: Input the initial speed. The parameter “StrVel” in the API function.
ConstVel: Input the constant speed. The parameter “ConstVel” in the API function.
EndVel: Input the end speed when it reaches the target position. The parameter “EndVel”
in the API function.
TPhase1: Input the duration from initial speed to constant speed. The parameter