EtherCAT Programming Guide API List of EtherCAT Dynamic-Link Library
March, 2017 4-5
4
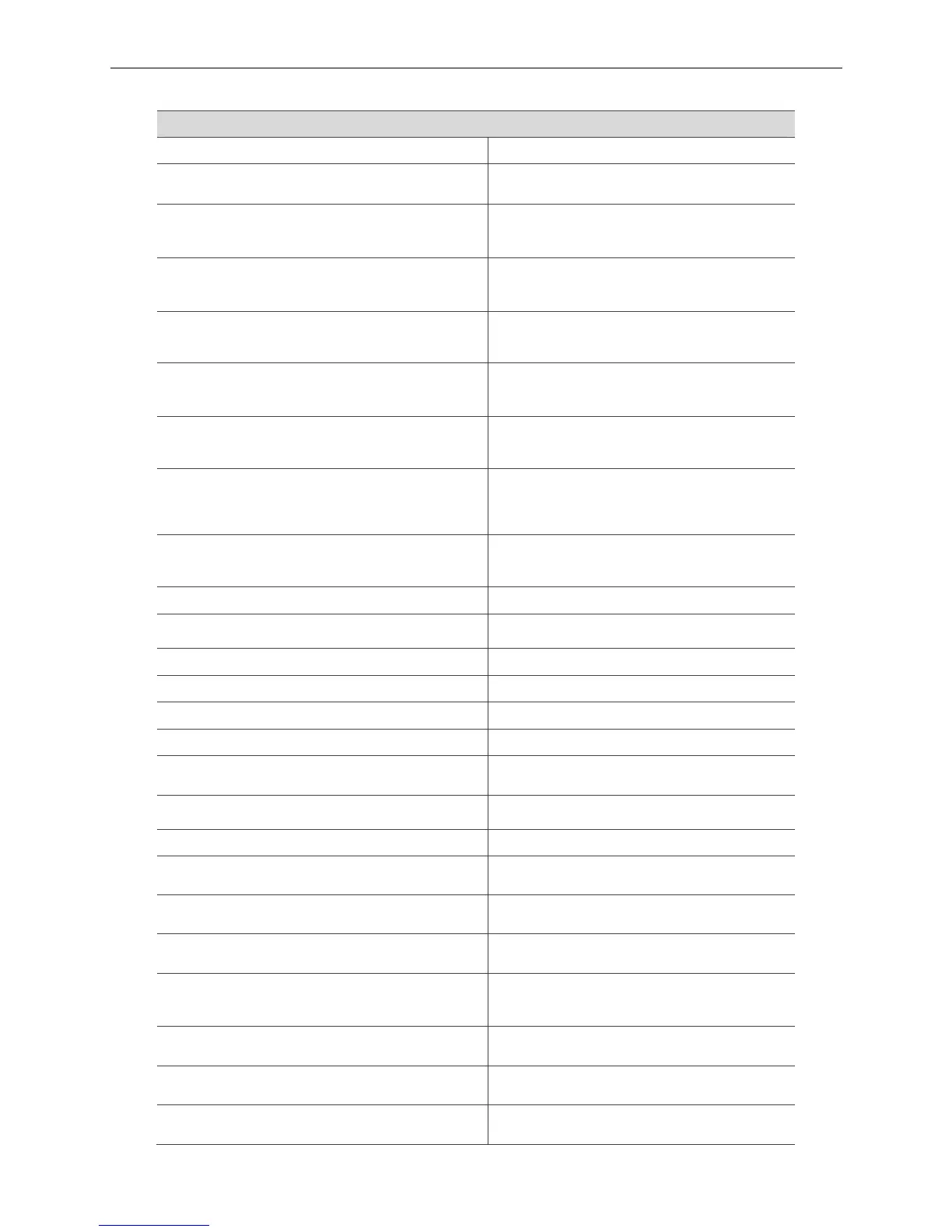
Cyclic Synchronous Position Mode (CSP)
_ECAT_Slave_CSP_Start_Move
Execute linear interpolation of single axis
_ECAT_Slave_CSP_Start_V_Move
Execute the single-axis motion with constant
speed
_ECAT_Slave_CSP_Start_Arc_Move
Execute two-axis arc motion, moving from current
position and the specified circle center to form the
specified arc’s angle
_ECAT_Slave_CSP_Start_Arc2_Move
Execute two-axis arc motion, moving from current
position and the specified circle center to form the
specified arc’s angle
_ECAT_Slave_CSP_Start_Arc3_Move
Execute two-axis arc motion, moving from the
current position and specified circle center to the
specified end point
_ECAT_Slave_CSP_Start_Spiral_Move
Execute two-axis spiral motion, moving from
current position and the specified circle center to
form the specified angle
_ECAT_Slave_CSP_Start_Spiral2_Move
Execute two-axis spiral motion, moving from
current position and the specified circle center to
the end point with the specified cycle number.
_ECAT_Slave_CSP_Start_Sphere_Move
Execute three-axis sphere motion and moving
from current position and the known circle center
to the target position with three-dimensional
vector
_ECAT_Slave_CSP_Start_Heli_Move
Set three-axis helical motion, moving from current
position and the known circle center to the
specified height in Z-axis direction
_ECAT_Slave_CSP_Start_Multiaxes_Move
Execute multi-axis linear motion
_ECAT_Slave_CSP_Start_Msbrline_Move
Execute multi-axis point to point motion with
smooth speed
_ECAT_Slave_CSP_Set_Gear
Set the E-gear ratio
_ECAT_Slave_CSP_Set_Softlimit
Set the software limit
_ECAT_Slave_CSP_TargetPos_Change
Set a new target position
_ECAT_Slave_CSP_Velocity_Change
Set a new target speed
_ECAT_Slave_CSP_Feedrate_Overwrite
For the advanced setting of speed change for
single axis
_ECAT_Slave_CSP_Speed_Continue_Enable Enable or disable the continuous speed function
_ECAT_Slave_CSP_Speed_Continue_Set_Mode Set the continuous speed mode
_ECAT_Slave_CSP_Speed_Continue_Set_Combine
_Ratio
Set the percentage of for starting blending speed
of two commands.
_ECAT_Slave_CSP_Scurve_Rate
Set the ratio of S-curve and T-curve during
acceleration and deceleration
_ECAT_Slave_CSP_Liner_Speed_Master
Set the speed (vector) of advanced interpolation
function
_ECAT_Slave_CSP_Mask_Axis
When multi-axis command is being executed, this
API can be used to stop the specified axes without
influencing others
_ECAT_Slave_CSP_Sync_Config
Set the function of synchronous motion of multiple
axes
_ECAT_Slave_CSP_Sync_Move
Enable the function of synchronous motion of
multiple axes
_ECAT_Slave_CSP_Start_Mabrline_Move
Set to smooth the operation of point-to-point
motion of multiple axes