API List of EtherCAT Dynamic-Link Library EtherCAT Programming Guide
4-6 March, 2017
4
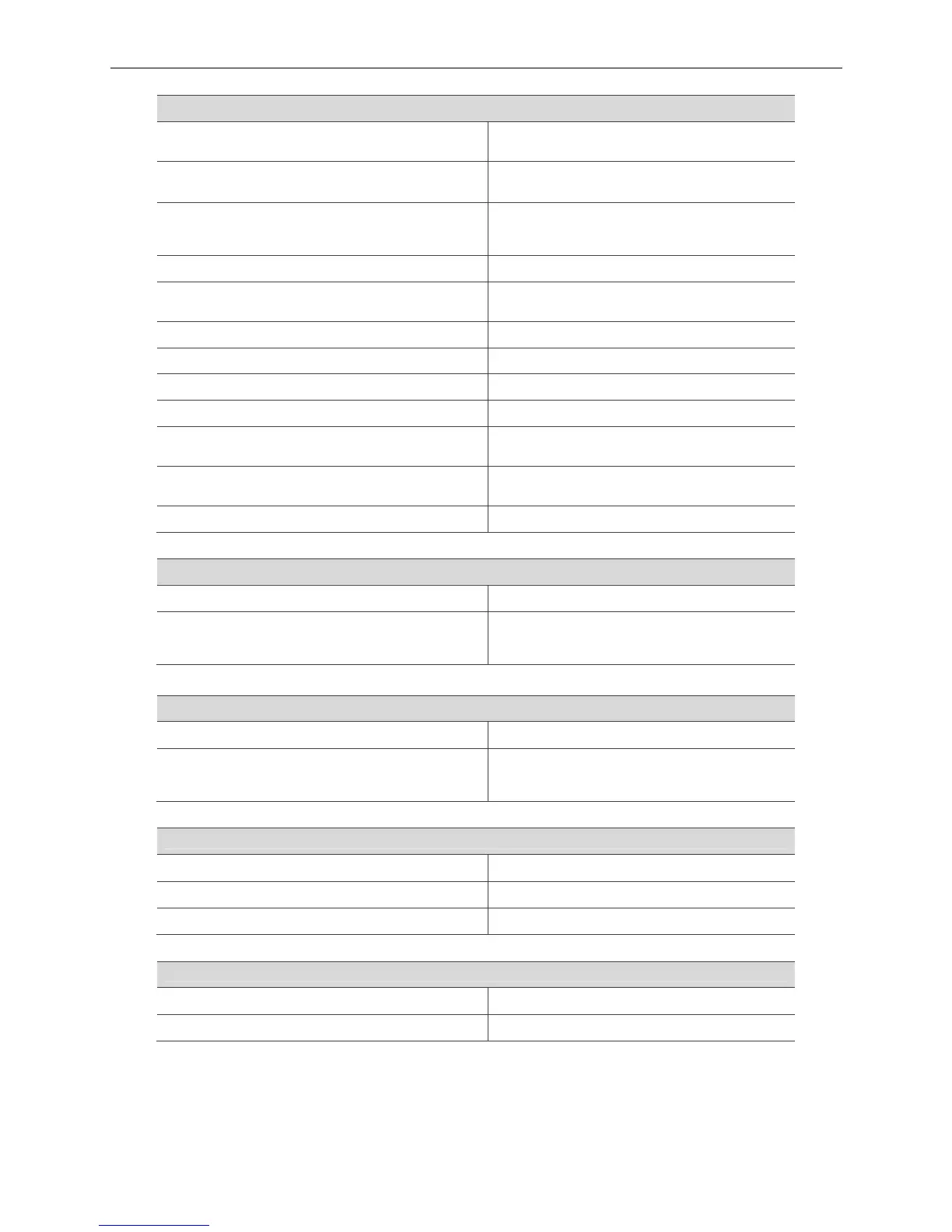
Cyclic Synchronous Position Mode (CSP)
_ECAT_Slave_CSP_Start_2Segment_Move
Set the single-axis linear motion by specifying two
distances and speed
_ECAT_Slave_CSP_Start_PVT_Move
Set the single-axis motion to move to multiple
points at fixed time
_ECAT_Slave_CSP_Start_PVTComplete_Move
Specify the initial speed and end speed of the
single-axis motion, moving through multiple points
at fixed time.
_ECAT_Slave_CSP_Virtual_Set_Enable Enable function of virtual position
_ECAT_Slave_CSP_Virtual_Set_Command
Set the virtual position and replacing the current
position with the specified position
_ECAT_Slave_CSP_Get_SoftLimit_Status Acquire the status of software limit
_ECAT_Slave_CSP_Pitch_Set_Interval Set the interval of the pitch error compensation
_ECAT_Slave_CSP_Pitch_Set_Mode Set the mode of pitch error compensation
_ECAT_Slave_CSP_Pitch_Set_Org Set the start position of pitch error compensation.
_ECAT_Slave_CSP_Pitch_Set_Rel_Table
Set the relative position of each interval for pitch
error compensation
_ECAT_Slave_CSP_Pitch_Set_Abs_Table
Set the absolute position of each interval for pitch
error compensation
_ECAT_Slave_CSP_Pitch_Set_Enable Enable function of pitch error compensation.
Cyclic Synchronous Velocity Mode (CSV)
_ECAT_Slave_CSV_Start_Move
Execute single-axis motion with the setting speed
_ECAT_Slave_CSV_Multi_Start_Move
Execute multi-axes synchronous motion with the
setting speed
Cyclic Synchronous Torque Mode (CST)
_ECAT_Slave_CST_Start_Move
Execute single-axis motion with the setting torque
_ECAT_Slave_CST_Multi_Start_Move
Execute multi-axis synchronous motion with the
setting torque
Homing
_ECAT_Slave_Home_Config
Set the homing mode
_ECAT_Slave_Home_Move
Execute homing
_ECAT_Slave_Home_Status
Acquire the current homing status
Profile Position Mode (PP)
_ECAT_Slave_PP_Start_Move
Execute single-axis linear motion in PP mode
_ECAT_Slave_PP_Advance_Config
Advanced setting of PP mode