EtherCAT Programming Guide API List of EtherCAT Dynamic-Link Library
March, 2017 4-7
4
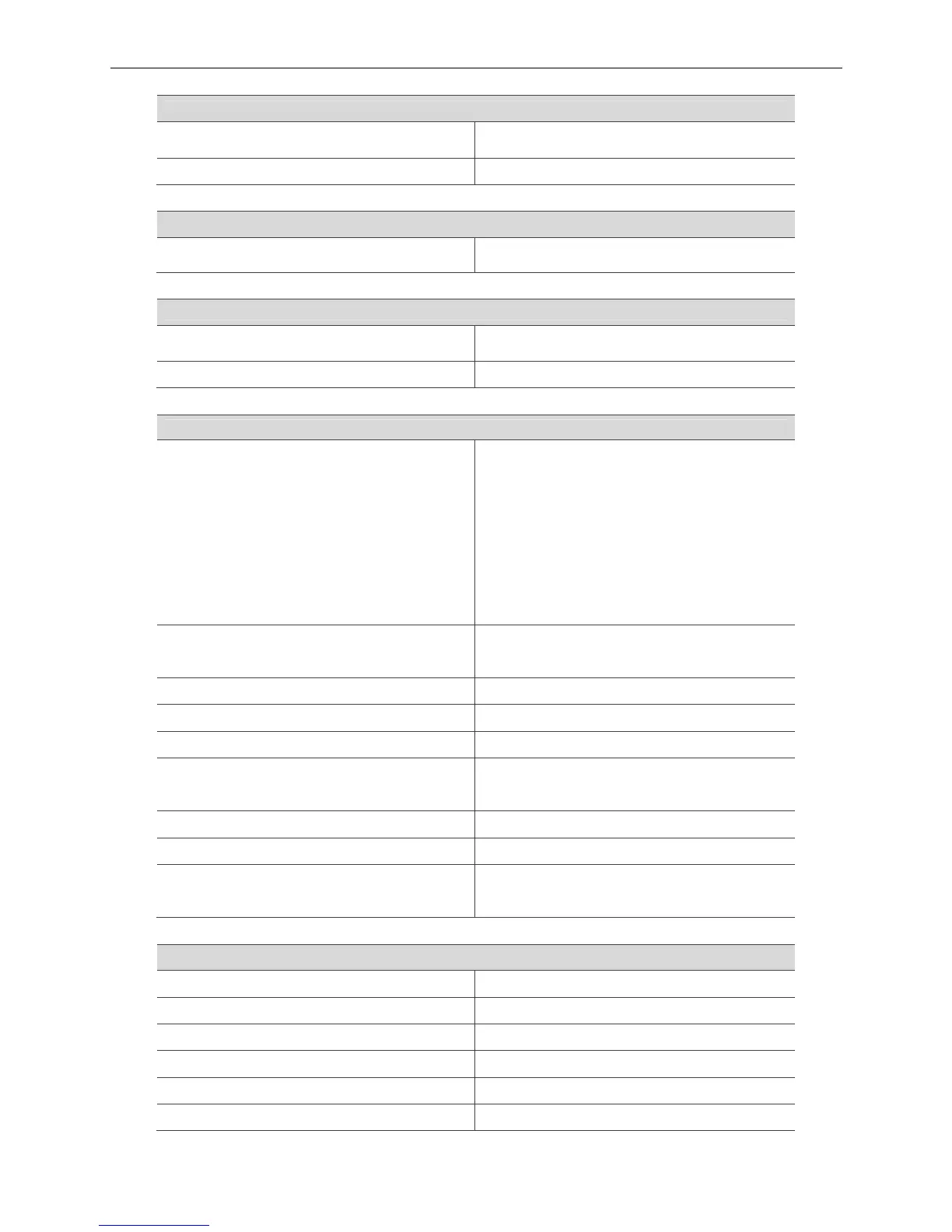
Profile Velocity Mode (PV)
_ECAT_Slave_PV_Start_Move
Execute the single-axis motion with constant speed
in PV mode
_ECAT_Slave_PV_Advance_Config
Advanced setting of PV mode
Invertor Motion Control
_ECAT_Slave_VL_Start_Move
Inverter single-axis motion control with constant
speed. (Delta inverter only)
Profile Torque Mode (PT)
_ECAT_Slave_PT_Start_Move
Execute the single-axis motion with constant torque
in PT mode
_ECAT_Slave_PT_Advance_Config
Advanced setting of PT mode
Group Motion Control
_ECAT_Slave_User_Motion_Control_Set_Enable_
Mode
Set the group status.
*Please note that before enabling the group, users
should apply Set_Motion_Control_Type to specify
the axis for one group and use
_ECAT_Slave_User_Motion_Control_ Svon and
_ECAT_Slave_User_Motion_Control_Get_Alm to
confirm the status of each axis.
_ECAT_Slave_User_Motion_Control_Get_Enable_
Mode
Acquire the status in the current group.
_ECAT_Slave_User_Motion_Control_Set_Type Set the motion mode in the specified group.
_ECAT_Slave_User_Motion_Control_Set_Data
Set the data of each axis in the specified group.
_ECAT_Slave_User_Motion_Control_Clear_Data
Clear the data of each axis in the specified group.
_ECAT_Slave_User_Motion_Control_Get_DataCnt
Read the data number that have not been
processed in the specified group.
_ECAT_Slave_User_Motion_Control_ Ralm
Reset the alarm of all axes in the specified group.
_ECAT_Slave_User_Motion_Control_ Svon
Enable/disable all axes in the specified group.
_ECAT_Slave_User_Motion_Control_Get_Alm
Acquire the current alarm status in the specified
group.
Operation of DI/DO module
_ECAT_Slave_DIO_Get_Input_Value Acquire the DI status
_ECAT_Slave_DIO_Get_Output_Value Acquire the DO status
_ECAT_Slave_DIO_Set_Output_Value Set the DO status
_ECAT_Slave_DIO_Get_Single_Input_Value Acquire the input value of the specified channel
_ECAT_Slave_DIO_Get_Single_Output_Value Acquire the output value of the specified channel
_ECAT_Slave_DIO_Set_Single_Output_Value Set the output value of the specified channel