User Manual Chapter 1
GFK-1742F Jan 2020
Product Overview 6
Local Logic
•
Delays associated with Local Logic data updates are based upon the position loop
update time interval (see “DSM314 Servo Loop Update Times”) and are not related
to the host controller scan. Therefore, Local Logic programs can utilize rapidly
changing DSM internal data that cannot be utilized by the host controller CPU due
to the host controller to DSM data transfer time and the host controller’s longer scan
time.
DSM314 Servo Loop Update Times
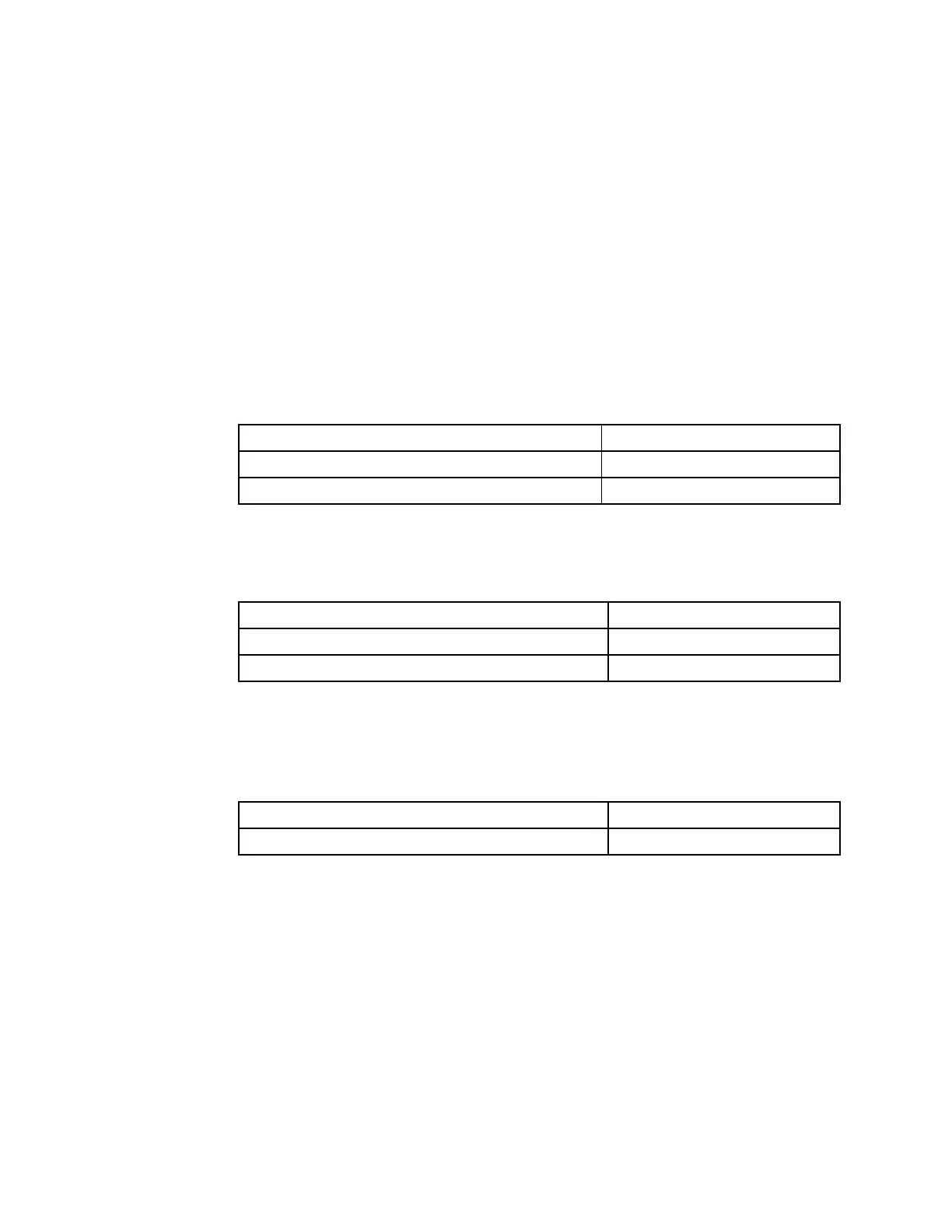
When controlling a digital AC servo, the DSM314 uses the loop update times shown in Table
1.
Table 1: Digital Servo Loop Update Times
Motor Current / Torque Loop:
When controlling an Analog servo, the DSM314 without Local Logic uses the loop update
times shown in Table 2.
Table 2: Analog Servo Loop Update Times without Local Logic
1-Axis Position Loop without Local Logic:
2-Axes Position Loop without Local Logic:
3-4 Axes Position Loop without Local Logic:
When controlling an Analog servo, the DSM314 with Local Logic uses the following loop
update times shown in Table 3. The loop update rates with Local Logic are longer since Axis
#4 time slot is used to calculate the Local Logic function.
Table 3: Analog Servo Loop Update Times with Local Logic
1 Axis Position Loop with Local Logic:
2 –3 Axes Position Loop with Local Logic:
Analog Torque mode includes a velocity regulator in addition to the position regulators. For
an axis in Analog Torque mode, the velocity regulator is run every 0.5 milliseconds.