Operating Principles
Rev. A
2-
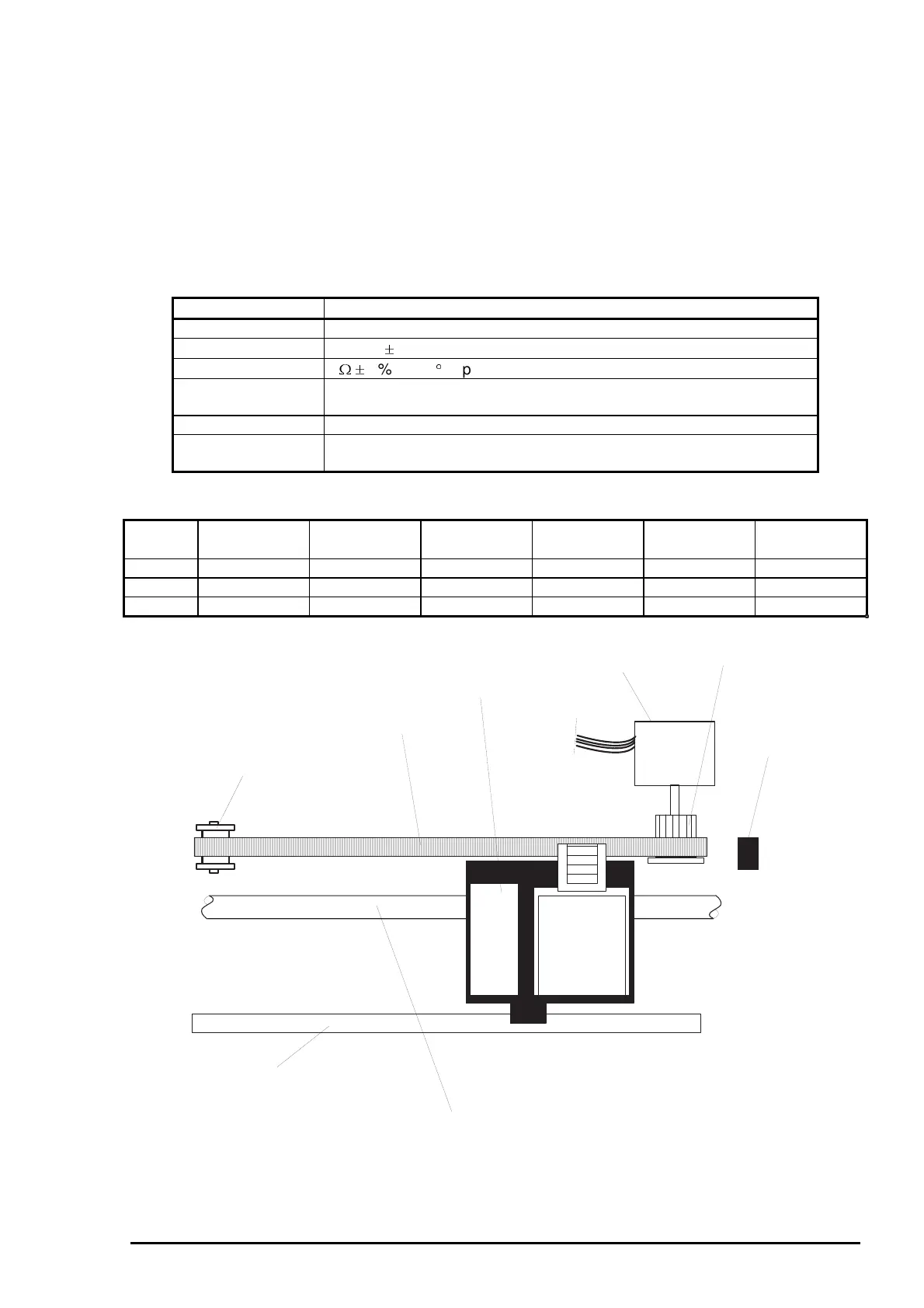
2.2.3 Carriage (CR) Mechanism
The CR mechanism is composed of the CR unit, timing belt, CR guide shaft, paper eject frame, HP
sensor (Home Position sensor) and CR motor. The CR motor sends torque to the timing belt to move the
CR unit in the both right and left directions along the paper eject frame and CR guide shaft. A stepping
motor used for the CR motor enables the CR unit to move and stop at any position. The CR is primarily
detected at the home position by HP sensor when the printer is turned on and its position is then
controlled by the open loop. Table 2-2 and Table 2-3 show the specification for the CR motor and the CR
motor drive terms, respectively.
Item Description
Motor type 4-phases / 200-pole / HB type stepping motor
Drive voltage
42 VDC
5% (The voltage applied to the driver)
Coil resistance
5
7% (at 25
C per 1 phase)
Excitation mode Unipolar drive
1-2 phase, 2w1-2 phase : Constant current drive
Drive frequency 480 ~ 9600 Hz
Minimum step 0.106 mm (1-2 phase drive)
0.026 mm (2W1-2 phase drive)
Print
mode
Print speed Acceleration
1
Acceleration
2
Constant Deceleration
1
Deceleration
2
Draft 400 cps 0.96 0.96 0.70 0.70 0.70
LQ 200 cps 0.96 0.96 0.70 0.80 0.80
SLQ 100 cps 0.90 0.90 0.60 0.80 0.80
Table 2-2 CR Motor Specification
Table 2-3 CR Motor Drive Terms
CR Unit
Timing Belt
Sub Pulley
CR Motor
Pulley
HP Sensor
CR Guide Shaft
Paper Eject Frame
Figure 2-4. CR Mechanism
 Loading...
Loading...