5.3 Description of Function Codes 5.3.8 J codes (Applied functions)
PID control (Anti-reset windup)
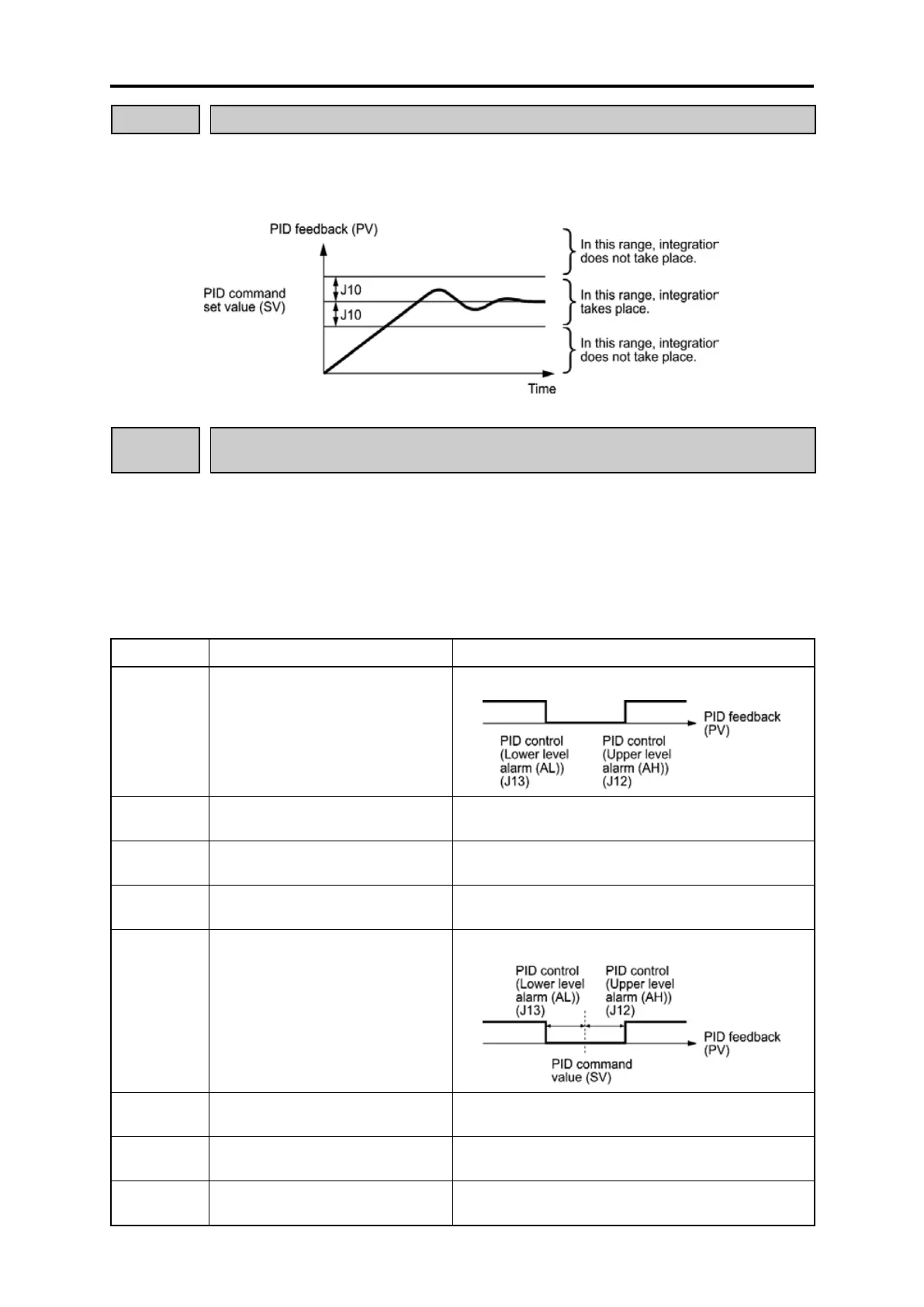
J10 suppresses overshoot in control with the PID processor. As long as the error between the feedback and the
PID command is beyond the preset range, the integrator holds its value and does not perform integration operation.
• Data setting range: 0 to 200(%)
PID Control (Select warning output, Upper limit of warning (AH) and Lower limit of
warning (AL))
The inverter can output two types of warning signals (caused by process command value or PID error value)
associated with PID control if the Digital output signal “PID-ALM” is assigned to any of the programmable, output
terminals with any of E20 to E24, and E27 (data = 42).
J11 specifies the warning output types. J12 and J13 each specify the upper and lower limits for warnings.
PID Control (Select warning output) (J11)
Sets the warning type. J11 specifies one of the following alarms available.
Warning caused by process
command value
While PV < AL or AH < PV, “PID-ALM” is ON
Warning caused by process
command value with hold
Same as above (with Hold)
Warning caused by process
command value with latch
Same as above (with Latch)
Warning caused by process
command value with hold and latch
Same as above (with Hold and Latch)
Warning caused by PID error value
While PV < SV - AL or SV + AH < PV, “PID-ALM” is ON.
Warning caused by PID error value
with hold
Same as above (with Hold)
Warning caused by PID error value
with latch
Same as above (with Latch)
Warning caused by PID error value
with hold and latch
Same as above (with Hold and Latch)

 Loading...
Loading...







