8. Parameter
Fieldbus Communication
220
RCP6
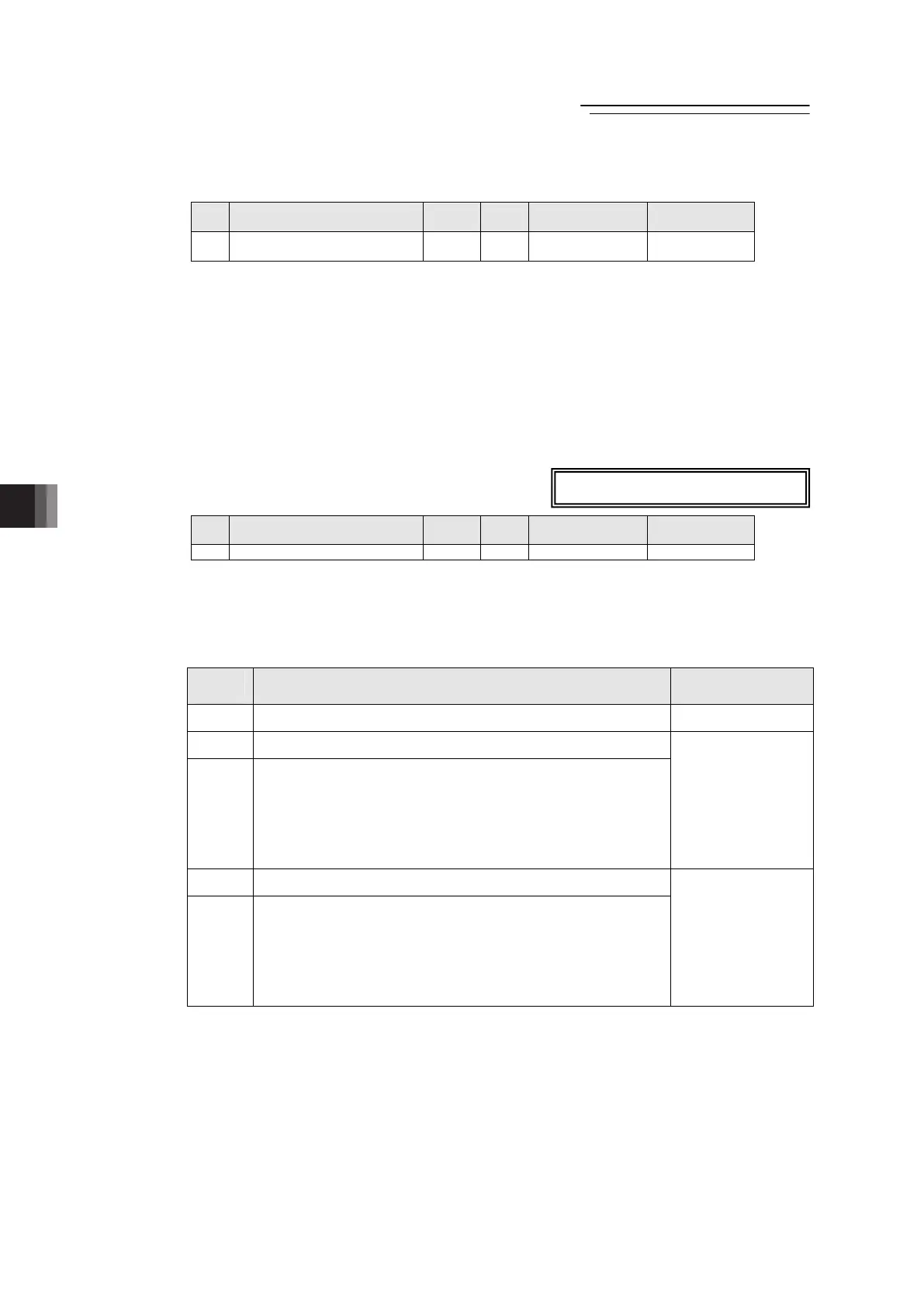
[68] Startup Current Limit Extension Feature (Parameter No.166)
No. Name Symbol Unit Input Range
Default factory
setting
166
Startup Current Llimit Extension
Feature
DCET -
0: Disabled
1: Enabled
0 (Disabled)
Drive control is made to the operation that causes an impact force at the start of movement
when moving to the target position from the stop state.
Effect is expected on an actuator used in large equipment with static friction of load (such as
gripper).
This feature would not work even if this parameter is activated in the following cases.
1) Home return
2) The first escape operation after pressing is finished
3) First movement after pause is released
4) When movement command is issued during operation
[69] Collision Detection Feature (Parameter No.168)
No. Name Symbol Unit Input Range
Default factory
setting
168 Collision Detection Feature CODT - 0 to 7 0
It is a feature to generate a collision detection alarm and stop the operation (turn the servo
OFF) when the actuator is crashed.
Detection is conducted in the range set that the position zone is set. [Refer to the Chapter 5
Collision Detection Feature]
Setting
value
Operation status Alarm level
0 Detection not to be conducted (same when set to 2, 4 or 6) -
1 Detection is conducted in position zone setting range.
3
(Note 1)
Detection is conducted in position zone setting range, but
is not conducted in the following conditions. In this setting,
it can avoid a mistake to detect the current during
acceleration.
• The first movement after releasing from a pause
• Movement from a stop in the positon zone range
Operation
cancellation level
5 Detection is conducted in position zone setting range.
7
(Note 1)
Detection is conducted in position zone setting range, but
is not conducted in the following conditions. In this setting,
it can avoid a mistake to detect the current during
acceleration.
• The first movement after releasing from a pause
• Movement from a stop in the positon zone range
Message level
Note 1 In this setting, it can avoid a mistake to detect the current during acceleration.
For RCP6S and RCM-P6PC only

 Loading...
Loading...