Chapter 3 Operation
89
Chapter 3 Operation
3.1 Basic Operation
3.1.1 Basic Operation Methods
There are two types, Positioner Mode and Pulse Train Control Mode, for the operation of
SCON-CA. Select the suitable one considering the system function.
The operation method for SCON-CAL/CGAL is Positioner Mode.
There are various types of actuators including slider, rod, rotary and gripper types. The same
operation control method is applicable unless particular descriptions are contained in this
manual.
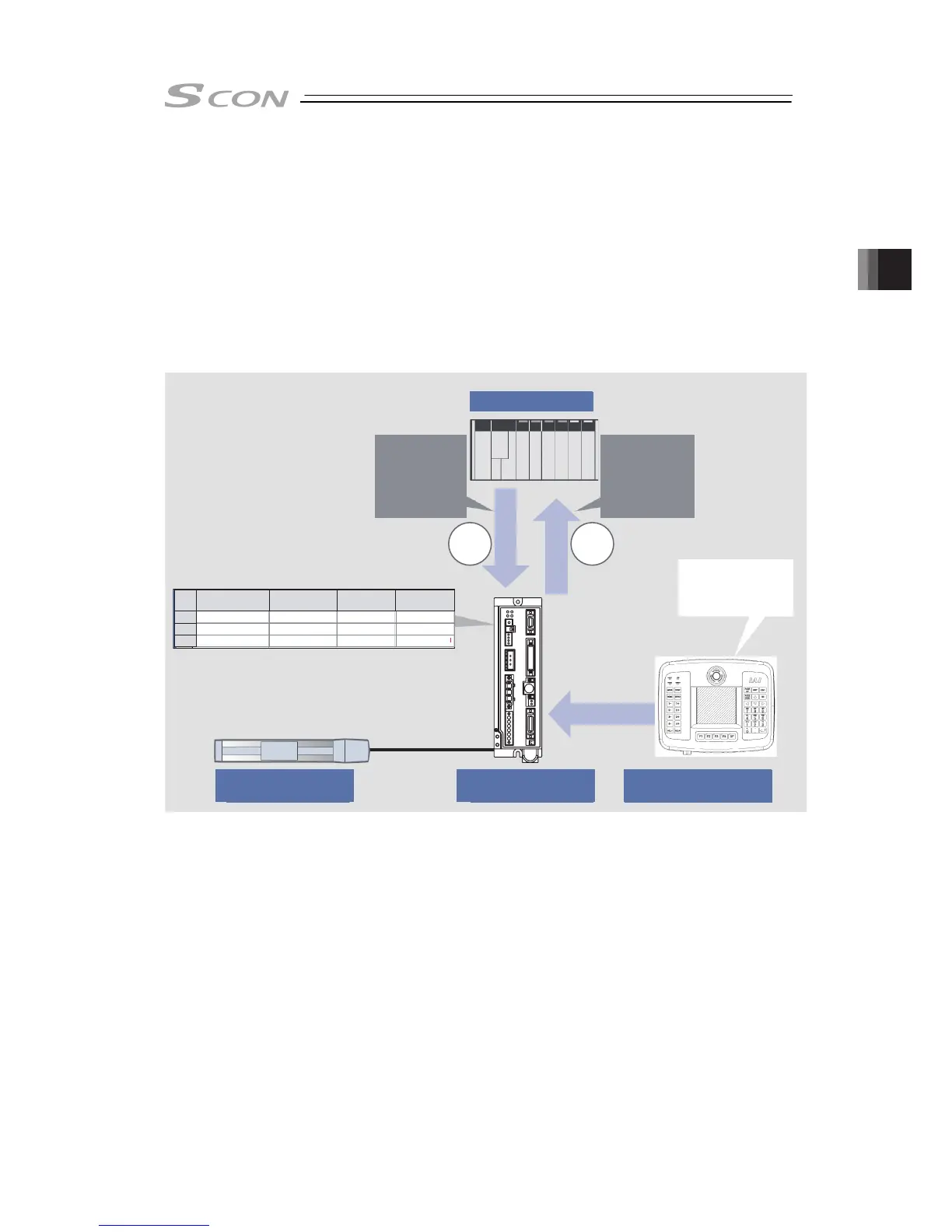
(1) Positioner Mode
Completion
Signal
Signal Signal
Edit Position
Table of
controller
Actuator
Controller
Teaching Pendant or
PC software
Position Number
+
Start Signal
PLC
Enter a data including
position, velocity,
acceleration or
deceleration, etc.
No.
[G]
0
1 100.00 0.30 0.30
2 200.00 0.30 0.30
100.00
200.00
Acceleration Deceleration Velocity
[mm] [mm/s] [G]
Position
1) Set target positions (coordinate values), velocities, accelerations, and decelerations by the
required number of positioning points in the position table by using a teaching tool such as
PC software.
2) Enter the binary data of position numbers subject to positioning on the PLC and turn ON
the start signal.
3) The actuator is placed at the proper coordinate value according to the positioning
information in the specified position number.
4) If the positioning is completed, the binary data of the position number is output. The
completion signal is also output.
The above procedure describes the basic operation method in the positioner mode.