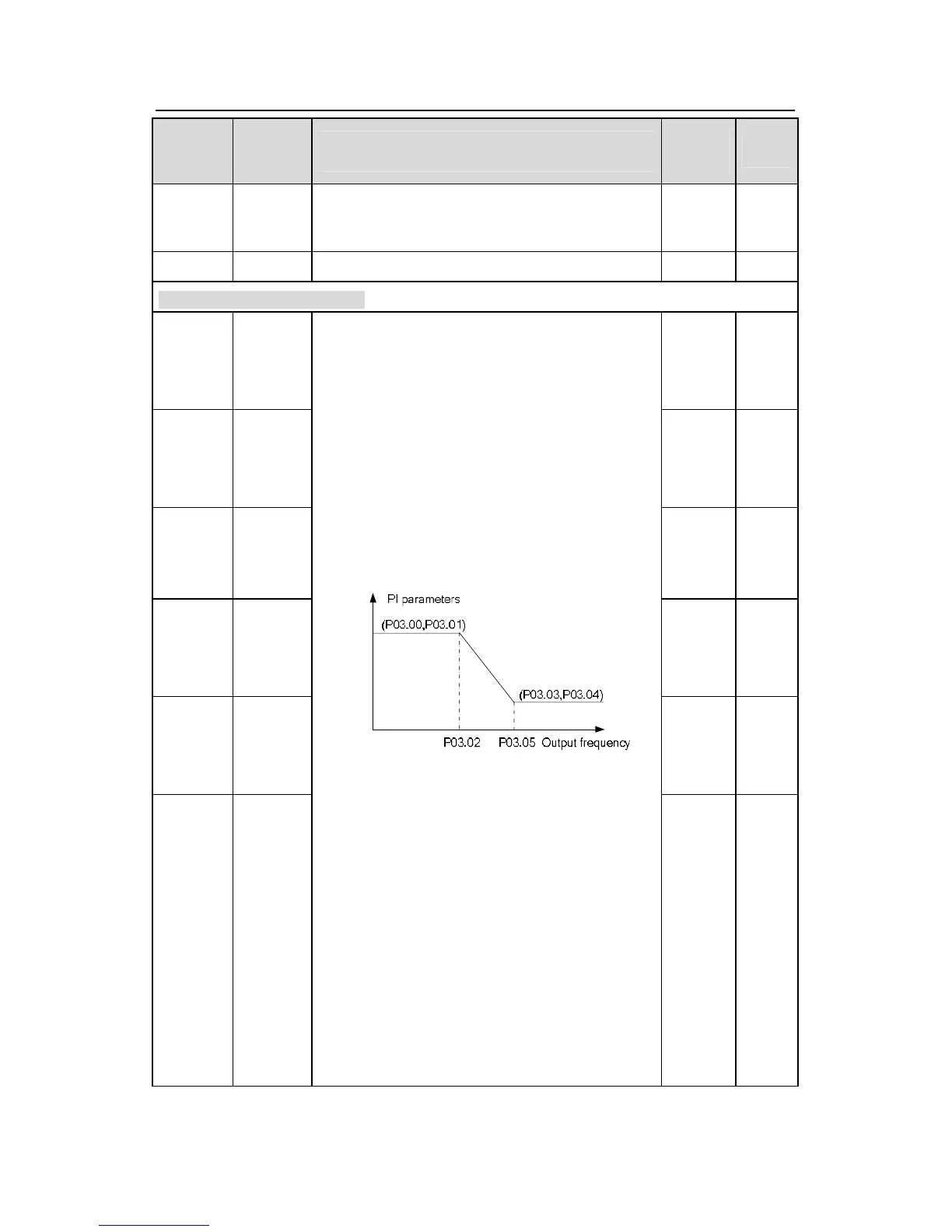
The parameters P03.00~P03.05 only apply to
vector control mode. Below the switching
frequency 1(P03.02), the speed loop PI
parameters are: P03.00 and P03.01. Above the
switching frequency 2(P03.05), the speed loop PI
parameters are: P03.03 and P03.04. PI
parameters are gained according to the linear
change of two groups of parameters. It is shown
as below:
Setting the proportional coefficient and integral
time of the adjustor can change the dynamic
response performance of vector control speed
loop. Increasing the proportional gain and
decreasing the integral time can speed up the
dynamic response of the speed loop. But too high
proportional gain and too low integral time may
cause system vibration and overshoot. Too low
proportional gain may cause system vibration
and speed static deviation.
PI has a close relationship with the inertia of the
20.0 ○
P03.01

 Loading...
Loading...