KurzB‐SeriesOperationsGuide4–58
Program ModeAdvanced Setup
Manually Tuning A PID Loop
TomanuallytuneaPIDloop:
1> Placetheunitinmanualcontrolmodeoropenloopcontrol.
2> Increaseordecreasethe4‐20mAoutputfrom5to10percent,andnotetheflowresponse
change.
ThentheProportionGainstartingpointis:2xoutputchange(engineeringunits/flow
responsechange)(thisisaunitlessnumber)
Notethesystemresponsetimechange(from0to63percent).
3> SettheIntegralresponsetimetothisnumber.
4> Setthederivativetimeconstantto1/6oftheintegraltime.
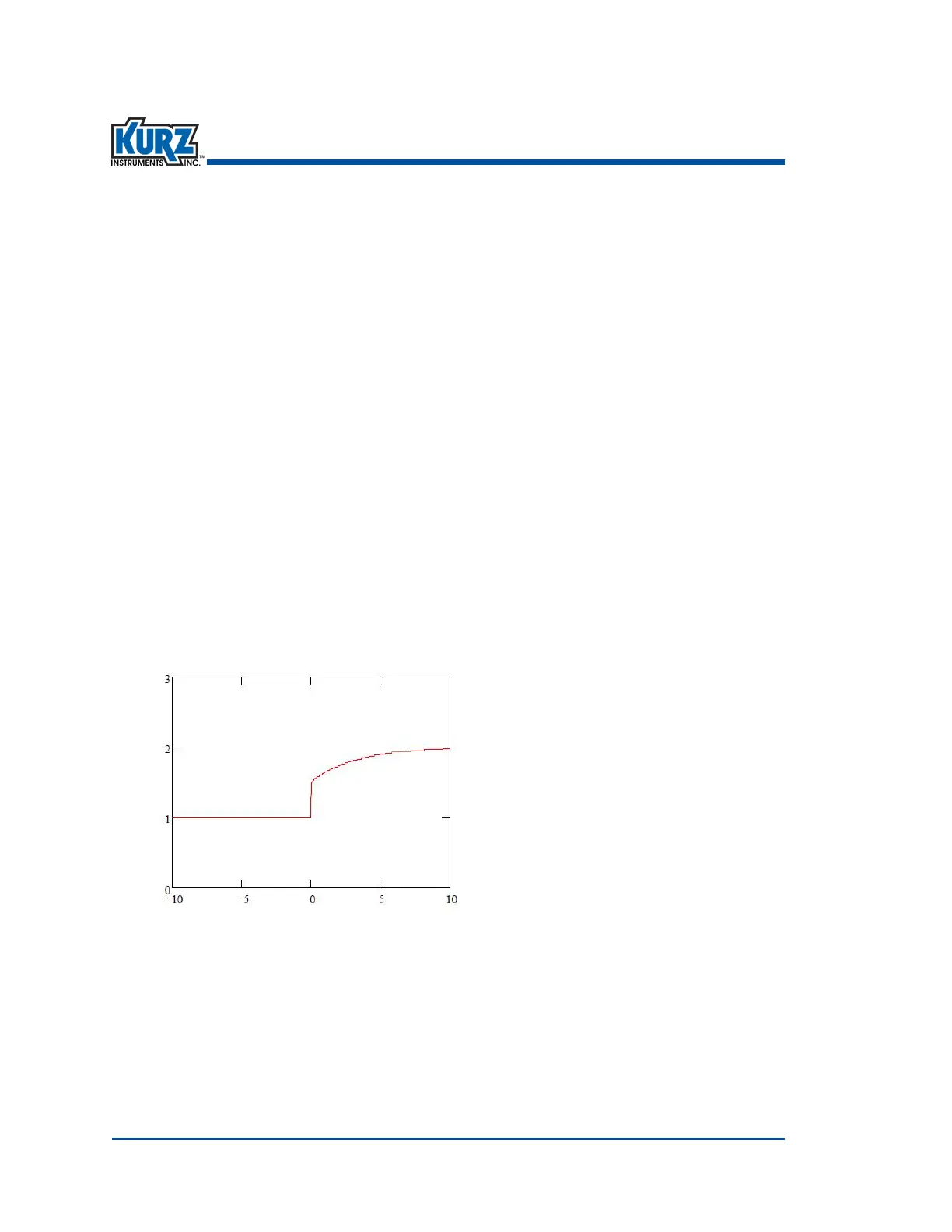
5> Placetheflowmeterinaclosedlooporautomaticoperation.Makeasmallchangetothe
setpointandobservethereaction,asshowninFigure 4‐2throughFigure 4‐4.
6> Someflowmetersrequiredifferentparametersatdifferentoperatingpoints.Ratherthan
resettingtheparametersmultipletimes,itisrecommendedthatyouoptimallytunethe
flowmeteratthenormalflowrateandaccepttheless‐than‐optimalresponseatotherflow
rates.Ifthevariationinloopstabilityistoo
largeovernormaloperatingflowranges,then
anadvancedPIDcontrollerwithvariablegainsettingsisrequiredtoovercomethe
limitationsofthebuilt‐inflowcontroller.
Figure 4‐2. Examplesofsystemresponses‐Increasevs.Decrease
Response
Time
Over Damped Response
Increase the proportional gain and
reduce the integral time constant.
 Loading...
Loading...


