Safety engineering
Operating mode
Introduction
8
l
156
EDS84DG752 EN 7.0
8.4 Operating mode
8.4.1 Introduction
Due to safety option 10, the following safety functions can be used:
ƒ Safe torque off (STO), formerly: safe standstill
If requested, the safe disconnection of the drive is achieved through:
ƒ Directly connected active sensors
ƒ Passive sensors connected to a safety switching device
The safety functions are suitable for applications according to IEC 61508 to SIL 3 and
achieve a performance level (PL) e and the control category 4 according to EN ISO 13849−1.
} Danger!
If the request for the safety function is cancelled, the drive will restart
automatically.
You must provide external measures which ensure that the drive only restarts
after a confirmation (EN 60204).
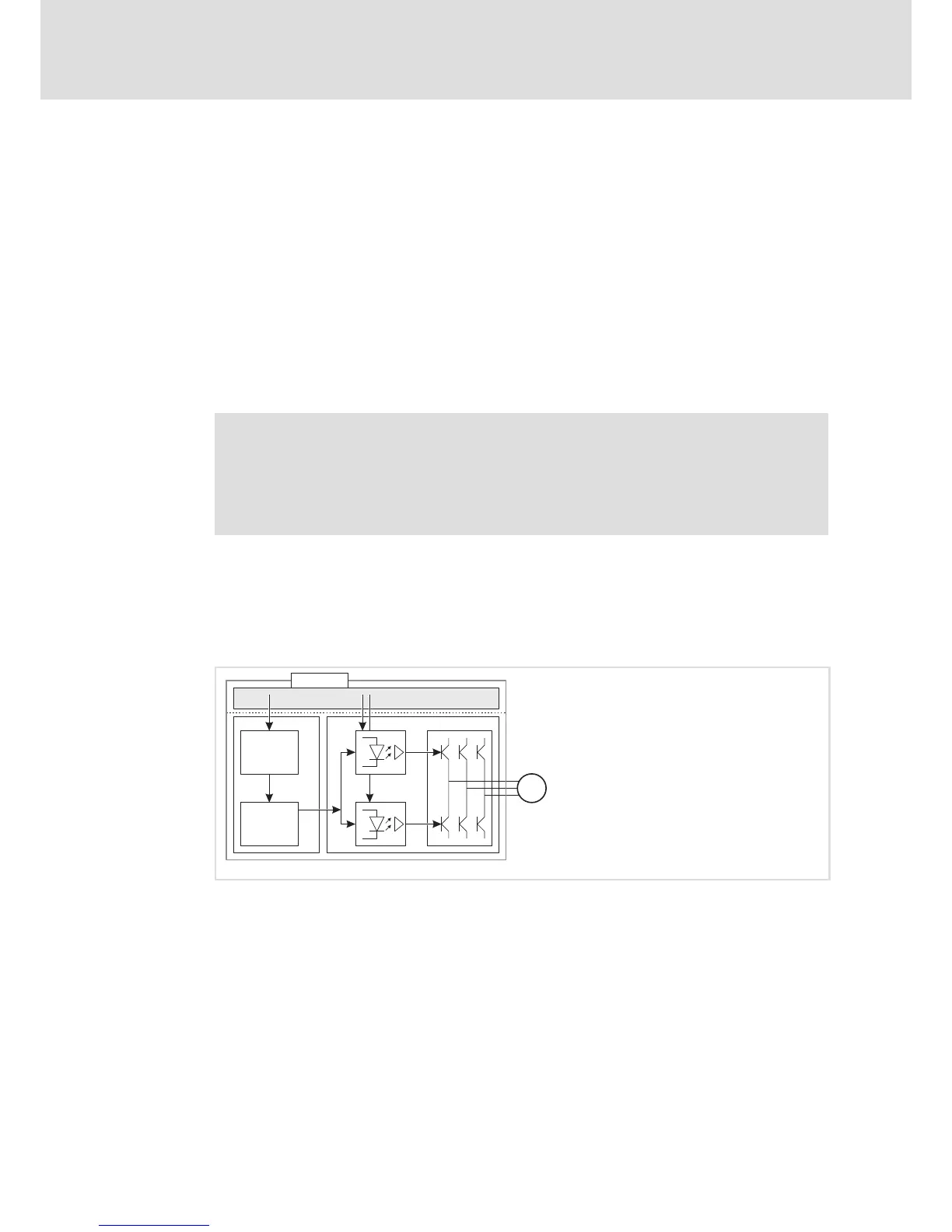
8.4.2 Disconnecting paths
The transmission of the pulse width modulation is safely switched (off) by the safety unit.
After this, the power drivers do not generate a rotating field. The motor is safely switched
to torqueless operation (STO).
E84DPSO02
Fig. 8−1 Operating principle of safety unit
SO Safety option 10
xxx Control terminals of the safety system or safety bus
C Control section
mC Microcontroller
PWM Pulse width modulation
P Power section
M Motor
8.4.3 Safety status
When the controller is disconnected from the safety unit, the "Safe torque off" (STO) status
is set (C00155 bit 10 = 1).

 Loading...
Loading...








