9. Navigation and guidance system
MiR600 User Guide (en) 08/2021 - v.1.0 ©Copyright 2021: Mobile Industrial Robots A/S. 95
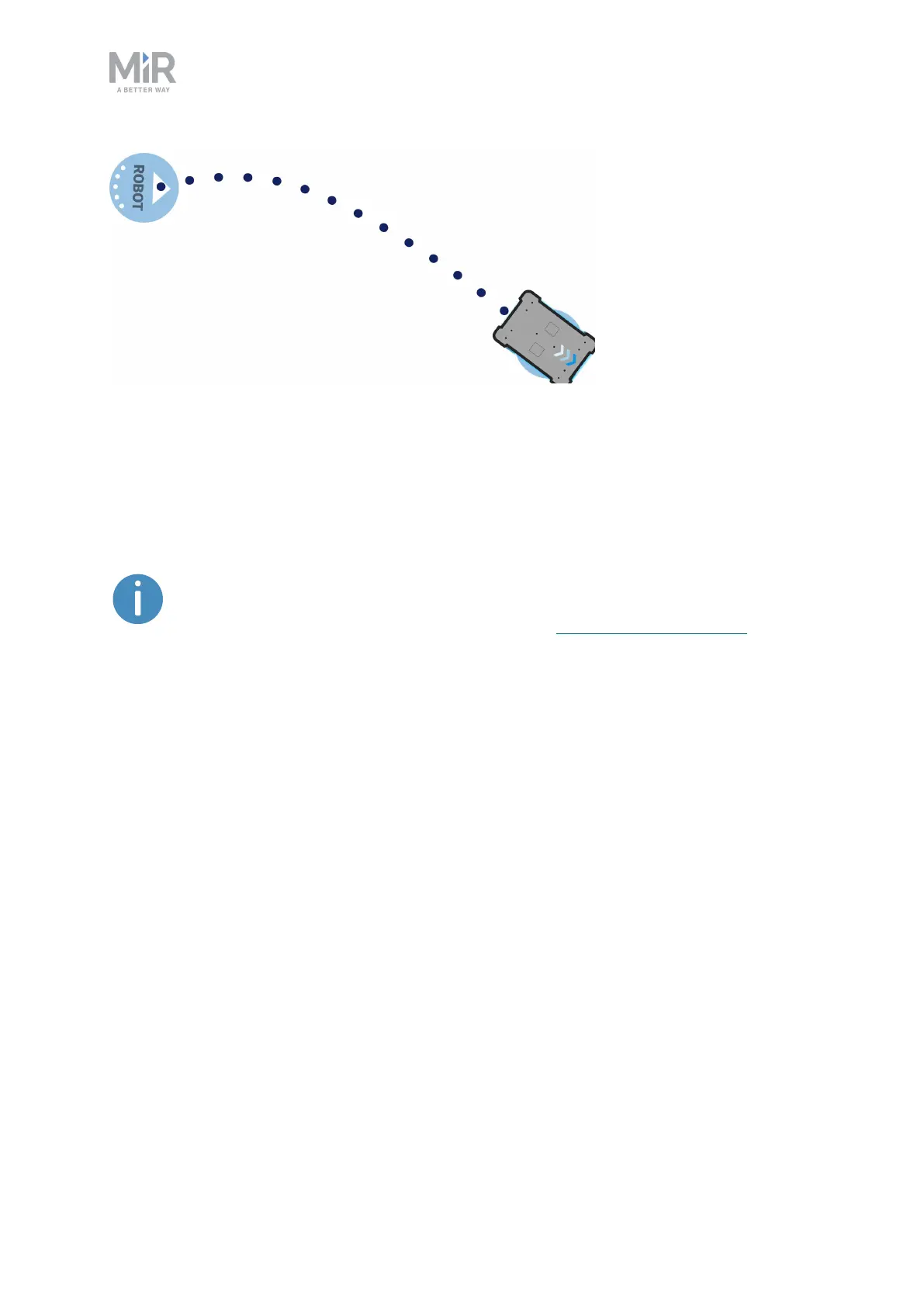
Figure 9.11. The robot has reached the goal position and stops by engaging the dynamic brake function.
Once the robot has stopped, the mechanical brakes are enabled. These brakes are used to
keep the robot in place once it has stopped. You can compare the mechanical brakes with
the parking brake or hand brake in a car.
The mechanical brakes are only used to stop the robot when it is in motion in
emergency situations triggered by the safety system. They will wear down if
they are used repeatedly to stop the robot—see Safety stop on page122.
The mechanical brakes are automatically released again when the robot receives a new
order requiring it to move.