12. Usage
MiR600 User Guide (en) 08/2021 - v.1.0 ©Copyright 2021: Mobile Industrial Robots A/S. 187
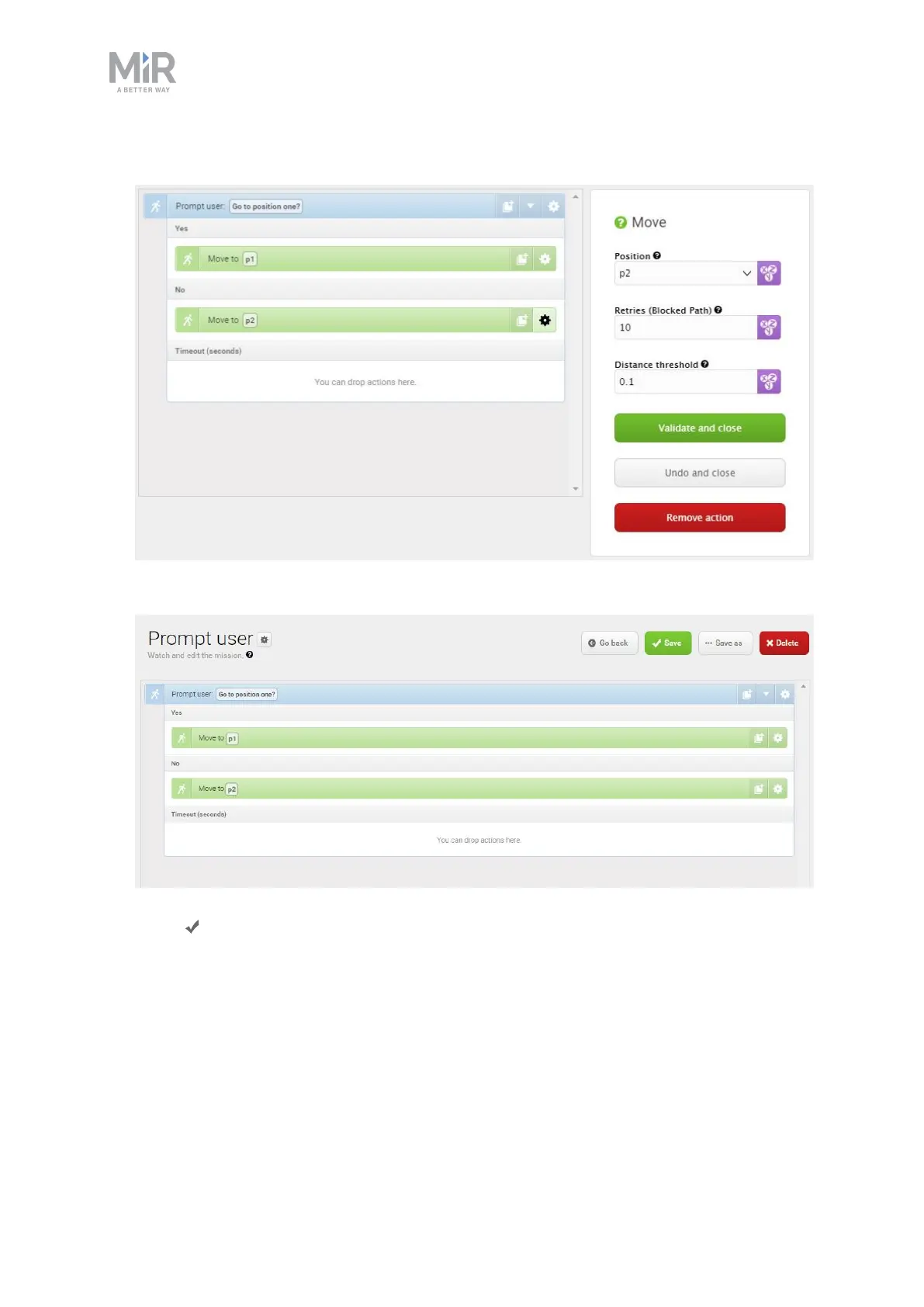
7. In the second Move to action, under Position, select p2.
The mission should look like this:
8. Select Save to save the mission.
12.4 Creating the mission Try/Catch
Try/Catch actions are used to handle mission errors. When you use a Try/Catch action, you
can define what the robot should do if, at any point, it fails to execute its main mission. This
prevents the robot from going into an error state and stopping in the middle of a mission by