XPS Unified Programmer’s Manual
7.2.1.159 PositionerCompensatedPCOEnable
Name
PositionerCompensatedPCOEnable – Activates the CIE08 compensated PCO pulses
generation.
Input tests
- Refer to section 7.1: “Input Tests Common to all XPS Functions”.
- Checks the positioner name: (-18)
- Checks the position encoder (“AquadB” or “AnalogInterpolated”): (-24)
- Checks the CIE board supports this function: (-115)
- Checks CIE08CompensatedPCOMode = Enabled (system.ini): (-121)
- Checks if data have been prepared by PositionerCompensatedPCOPrepare(): (-122)
- Checks current position is out and at the good side of scanning zone (left of
scanning zone if ScanDirection positive, right of scanning zone if ScanDirection
negative): (-22)
- Checks CIE08 compensated PCO mode is running: (-22)
Description
This function activates the CIE08 compensated PCO pulses generation (status becomes
running (value 1)). The pulses will be generated when the scanning positioner moves
across the predefined positions. When the last pulse is generated, the CIE08
compensated PCO mode will become inactive (status becomes inactive (value 0)). To
get status of the CIE08 compensated PCO pulses generation, use
PositionerCompensatedPCOCurrentStatusGet() function.
Note that only the scanning positioner positions are used to fire pulses: if you prepare a
set of positions at a given location and then enable the pulses generation and start the
move from a different location, the pulses could be generated but their accuracy will be
impacted by the mapping difference between the two locations.
This function must be used after the firing pulses data preparation with the
PositionerCompensatedPCOPrepare(), elsewhere the function fails and the error
ERR_CHECK_DATA_INCORRECT (-122) will be returned. With XPS-Q if the
settings are out of range, the user might experience pulses spaced unevenly without
getting any error messages.
NOTE
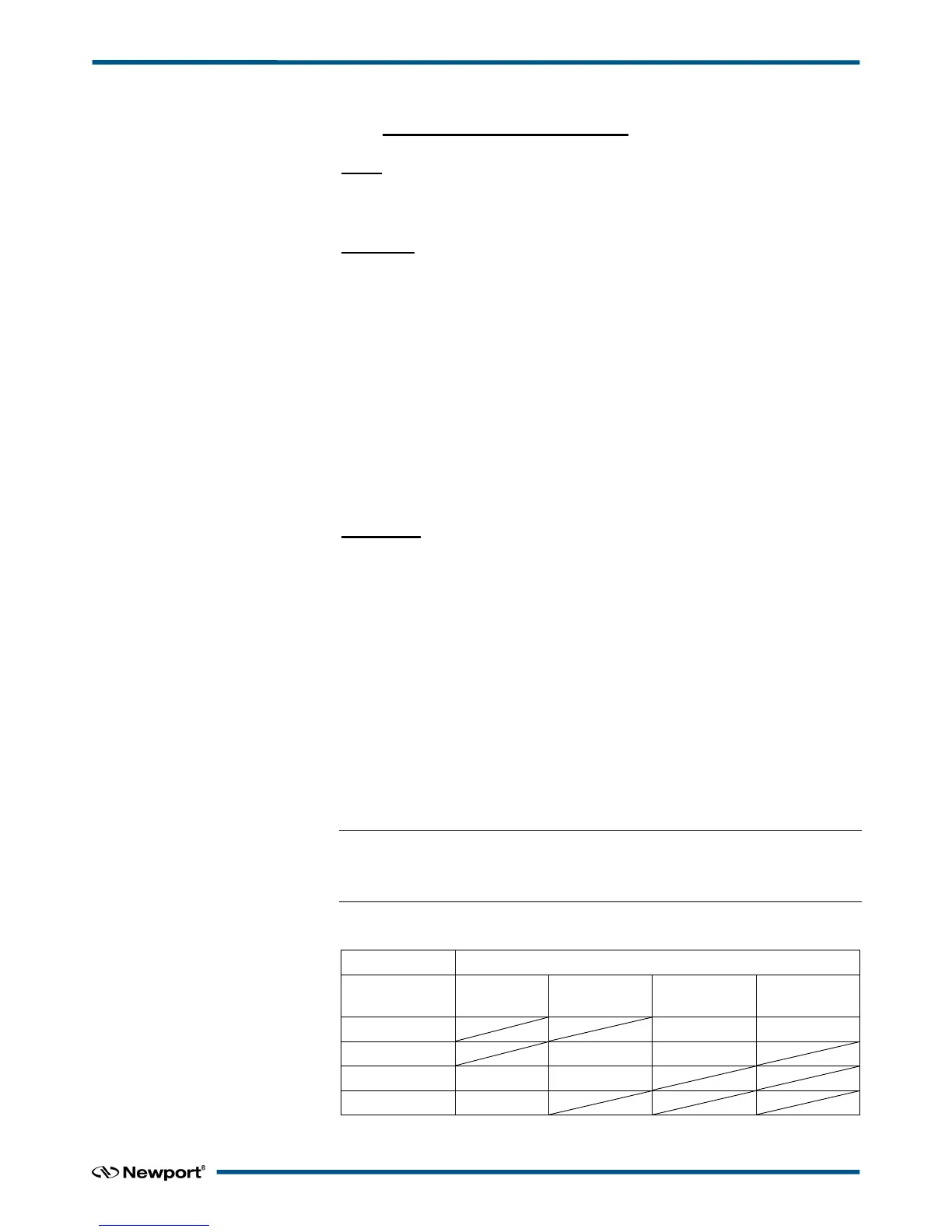
The PCO pulses generation depends on the ScanVelocity and the pulse settling
time (set by PositionerPositionComparePulseParametersSet())
Valid settings are shown in the table below:

 Loading...
Loading...









