5-26
5-6 Full Closing Control
Accurax G5 AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
5
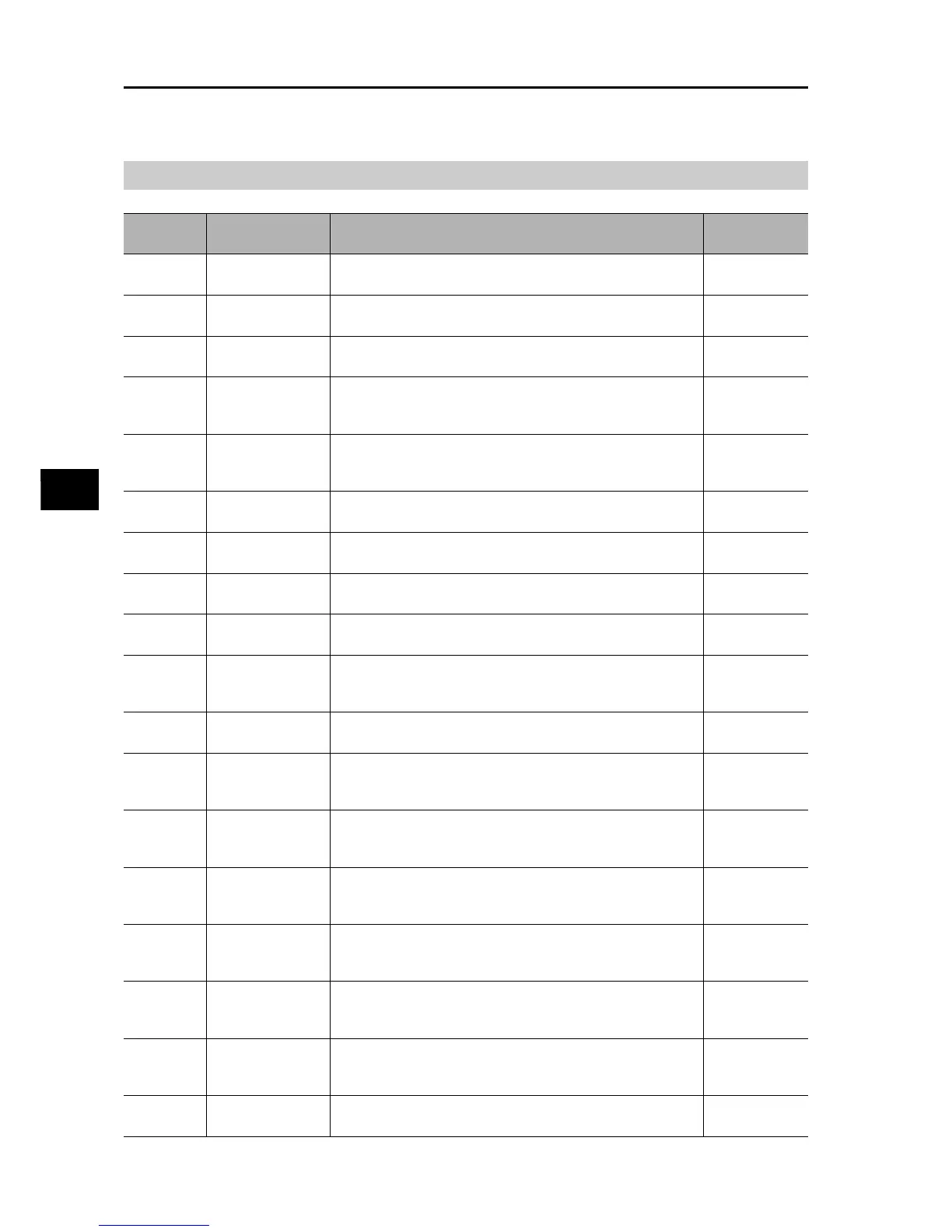
BASIC CONTROL Mode
Parameters Requiring Settings
Parameter
number
Parameter name Explanation Reference
Pn000
Rotation Direction
Switching
Set the relation between the command direction and the motor
rotation direction.
P.8-2
Pn001
CONTROL mode
Selection
Select the CONTROL mode.
P.8-2
Pn005
Command Pulse
Input Selection
Select the command pulse input.
P.8-4
Pn006
Command Pulse
Rotation Direction
Switching Selection
Set the count direction for the command pulse input.
P.8-4
Pn007
COMMAND
PULSE mode
Selection
Set the count method for the command pulse input.
P.8-4
Pn008
Electronic Gear
Integer Setting
Set the number of command pulses corresponding to 1 motor
rotation.
P.8-6
Pn009
Electronic Gear
Ratio Numerator 1
Set the numerator of the electronic gear ratio for the command
pulse input.
P.8-6
Pn010
Electronic Gear
Ratio Denominator
Use this parameter to set the denominator of the electronic
gear ratio for the command pulse input.
P.8-6
Pn011
Encoder Dividing
Numerator
Set the number of phase A and phase B output pulses,
respectively per motor rotation.
P.8-7
Pn012
Encoder Output
Direction Switching
Selection
Select the phase B logic for pulse regeneration output and the
output source. P.8-7
Pn323
External Feedback
Pulse Type Selection
Select the external scale type.
P.8-33
Pn324
External Feedback
Pulse Dividing
Numerator
Set the numerator of the external scale divider setting.
P.8-34
Pn325
External Feedback
Pulse Dividing
Denominator
Set the denominator of the external scale divider setting.
P.8-34
Pn326
External Feedback
Pulse Direction
Switching
Set the polarity of the external scale feedback pulse.
P.8-34
Pn327
External Feedback
Pulse Phase-Z
Setting
Set whether to enable or disable the disconnection detection
function of phase Z when a 90 phase difference output type
external scale is used.
P.8-35
Pn328
Internal/External
Feedback Pulse Error
Counter Overflow Level
Set the threshold of A250 "internal/external feedback pulse
error counter overflow" in the command unit. P.8-35
Pn329
Internal/External
Feedback Pulse
Error Counter Reset
The hybrid error becomes 0 every time the motor rotates by the
set value. P.8-35
Pn503
Encoder Dividing
Denominator
Set the denominator when the number of pulses per motor
rotation in pulse regeneration is not an integer.
P.8-46

 Loading...
Loading...