5-76
5-16 User Parameters
5
Operating Functions
• Use this parameter to set the number of encoder pulses output from the pulse outputs (+A: CN1
pin 21, −A: CN1 pin 22, −B: CN1 pin 48, +B: CN1 pin 49)
• If the Encoder Divider Denominator Setting (Pn45) is 0, the number of output pulses for one
Servomotor rotation can be set for A and B using the Encoder Divider Numerator Setting (Pn44).
The resolution of the pulse output after multiplication by 4 will be as follows:
Pulse output resolution per rotation = Encoder Divider Numerator Setting (Pn44)
× 4
• If the Encoder Divider Denominator Setting (Pn45) is not 0, the pulse output resolution per rotation
can be set using the following encoder divider equation.
• The encoder resolution for a 17-bit absolute encoder is 131,072
pulses/rotation and a 2,500-pulse/
rotation, 5-core incremental encoder is
10,000 pulses/rotation.
• The pulse output resolution per rotation will never exceed the encoder resolution. (If the above
settings are used, the pulse output resolution per rotation will be equal to the encoder resolution.)
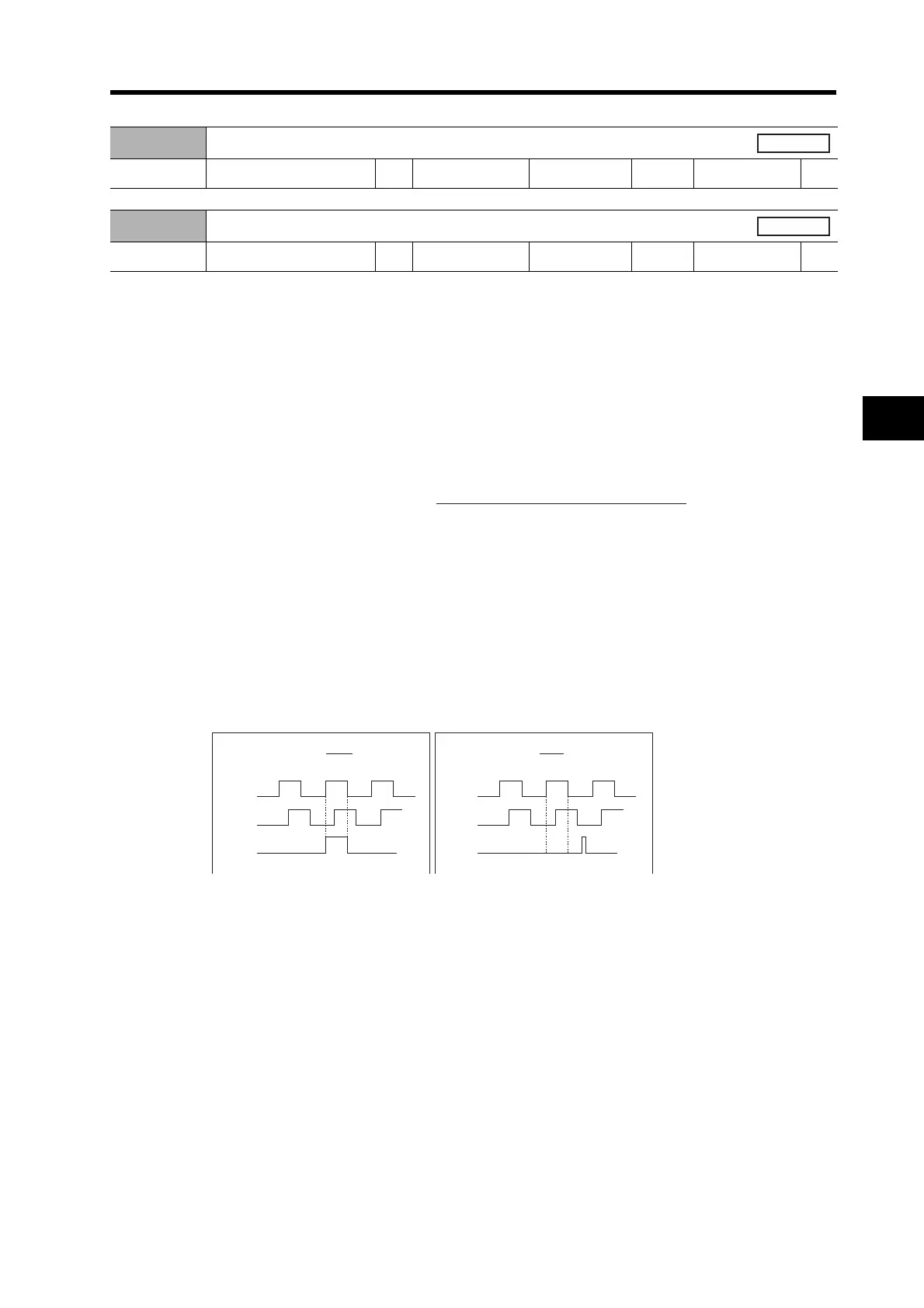
• One phase-Z signal is output for each rotation of the Servomotor.
• If the value from the above equation is a multiple of 4, phases Z and A are synchronized. In all
other cases, the output width of phase Z will coincide with the encoder resolution, so phases A and
Z will not be synchronized.
• Refer to 5-7 Encoder Dividing on page 5-15 for more information on the encoder divider.
Pn44
Encoder Divider Numerator Setting
Setting range 0 to 32767 Unit --- Default setting 2500
Power OFF→ON
Yes
Pn45
Encoder Divider Denominator Setting
Setting range 0 to 32767 Unit --- Default setting 0
Power OFF→ON
Yes
Pulse output resolution per rotation =
Pn44 (Encoder Divider Numerator Setting)
Pn45 (Encoder Divider Denominator Setting)
× Encoder resolution
A
B
Z
Synched
A
B
Z
Not synched
Pn44
Pn45
Encoder resolution × : Multiple of 4
Pn44
Pn45
Encoder resolution × : Not multiple of 4

 Loading...
Loading...

