•
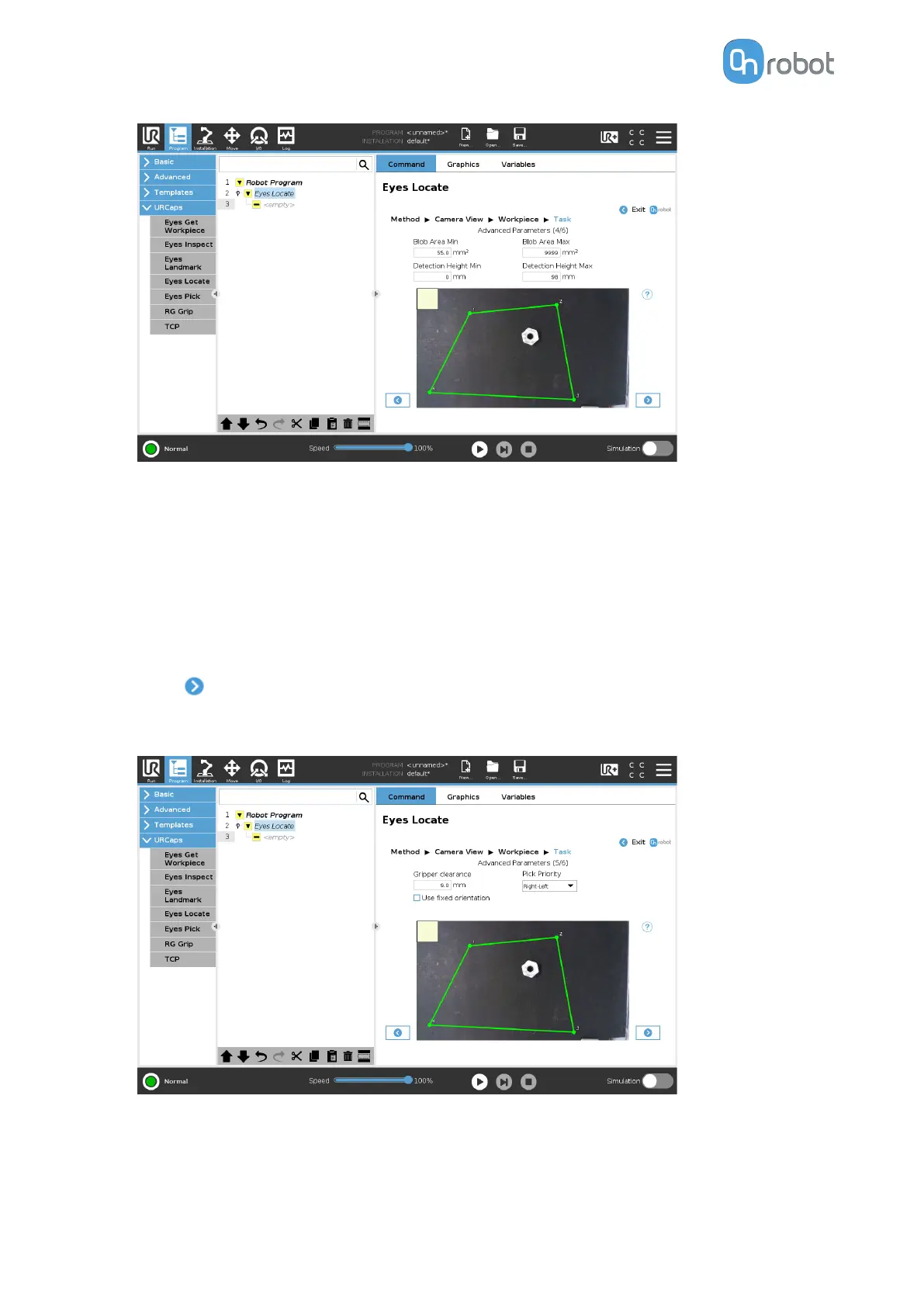
Blob Area: Selects a size range of the objects detected in squared millimeters.
•
Detection Height: This parameter ensures that only objects inside of a given height
range from the camera view plane will be detected as possible workpieces. Use the
parameter when detecting tall workpieces, so that only the top part is used to compute
the position of the workpiece. Increase the robustness to disturbances like shadows or
reflections, as these usually appear at camera view plane level. It is recommended to
have a range large enough to allow variations in the height of the workpieces. The
eect can be seen in the textured zone in the image feed, which indicates the
foreground.
•
Press
.
•
Adjust the detection by setting the Gripper clearance, Pick priority, and Use fixed
orientation parameters.
•
Gripper clearance: Distance of the free space around an object in [mm], which is
required for the detection. This parameter can be used to guarantee that the gripper
will be able to grip the object.
OPERATION
56
 Loading...
Loading...







