•
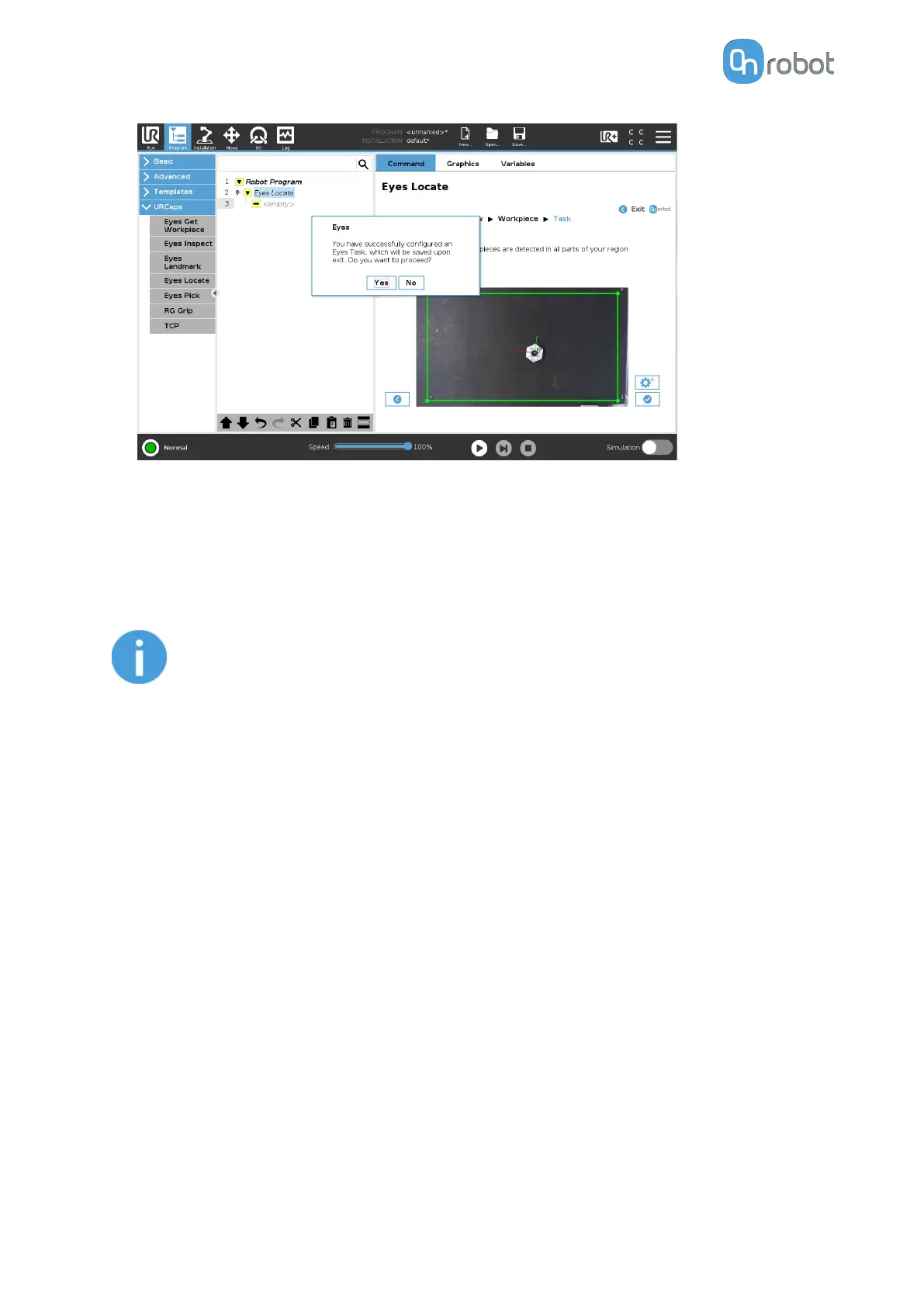
Press Yes to save and exit the Task
configuration.
Configure
Eyes in the Robot Program
The Eyes Locate command is used to run an Eyes task to detect workpieces. This command
is normally used together with the Eyes Get Workpiece command, using the latter as a child
command.
NOTE:
If the camera is attached to the robot wrist, the camera view is linked to the
robot pose. Before using the Eyes Locate it is required to move the robot to
the saved robot pose for the appropriate camera view. In the case of an
external mount is used, ensure the camera is not obstructed by the robot.
When the Eyes Locate command is executed, the Eyes will attempt to identify workpieces
defined by the chosen Eyes task. The dierent functions are explained below.
OPERATION
64
 Loading...
Loading...







