MercuryiTC
©2014 Oxford Instruments Omicron NanoScience. All rights reserved.
Page 148
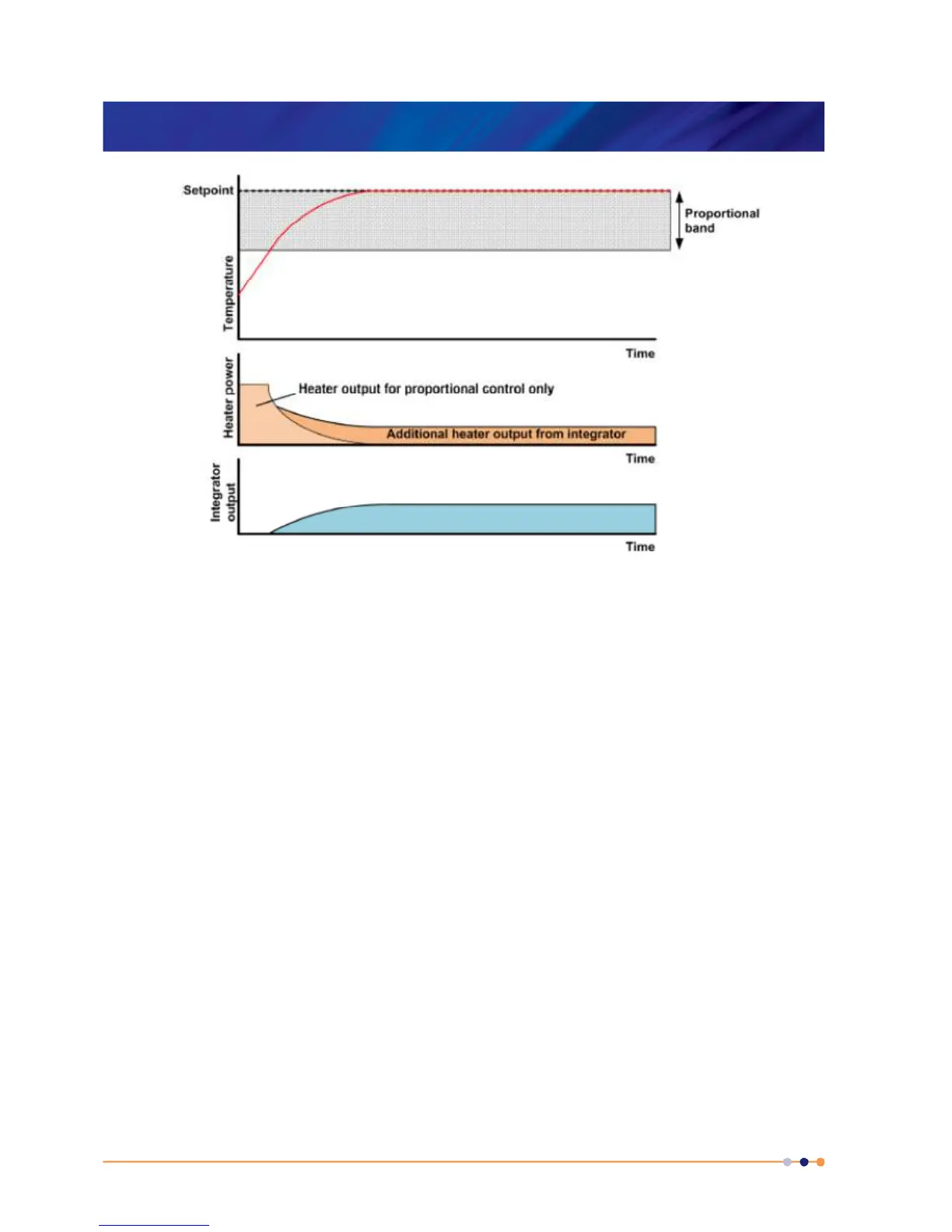
Figure 9 Proportional control with integrator action
If the setpoint increases by a large amount, the integrator output ramps up for all the time that
the temperature error is negative. When the sample temperature reaches the proportional band,
the integrator output may be at its maximum value. The integrator then takes significant time to
reduce its output to the required value, resulting in a large temperature overshoot. To prevent
this overshoot, the integrator output held at zero until the sample temperature is within the
proportional band.
A PID controller can be made to operate in this mode by setting the proportional band (P)
parameter to a positive temperature value, and the integral (I) parameter to a non-zero action
time.
14.2.5 Proportional control with integral and derivative
action
Adding derivative action to the proportional control loop can improve the control response.
Derivative action monitors the rate of change of the measured temperature, and modifies the
control output to minimise this rate of change.

 Loading...
Loading...