13 Software
SoftwareSoftware
Software
07-02-12-02-EN-V1215.doc / Type: 638
125
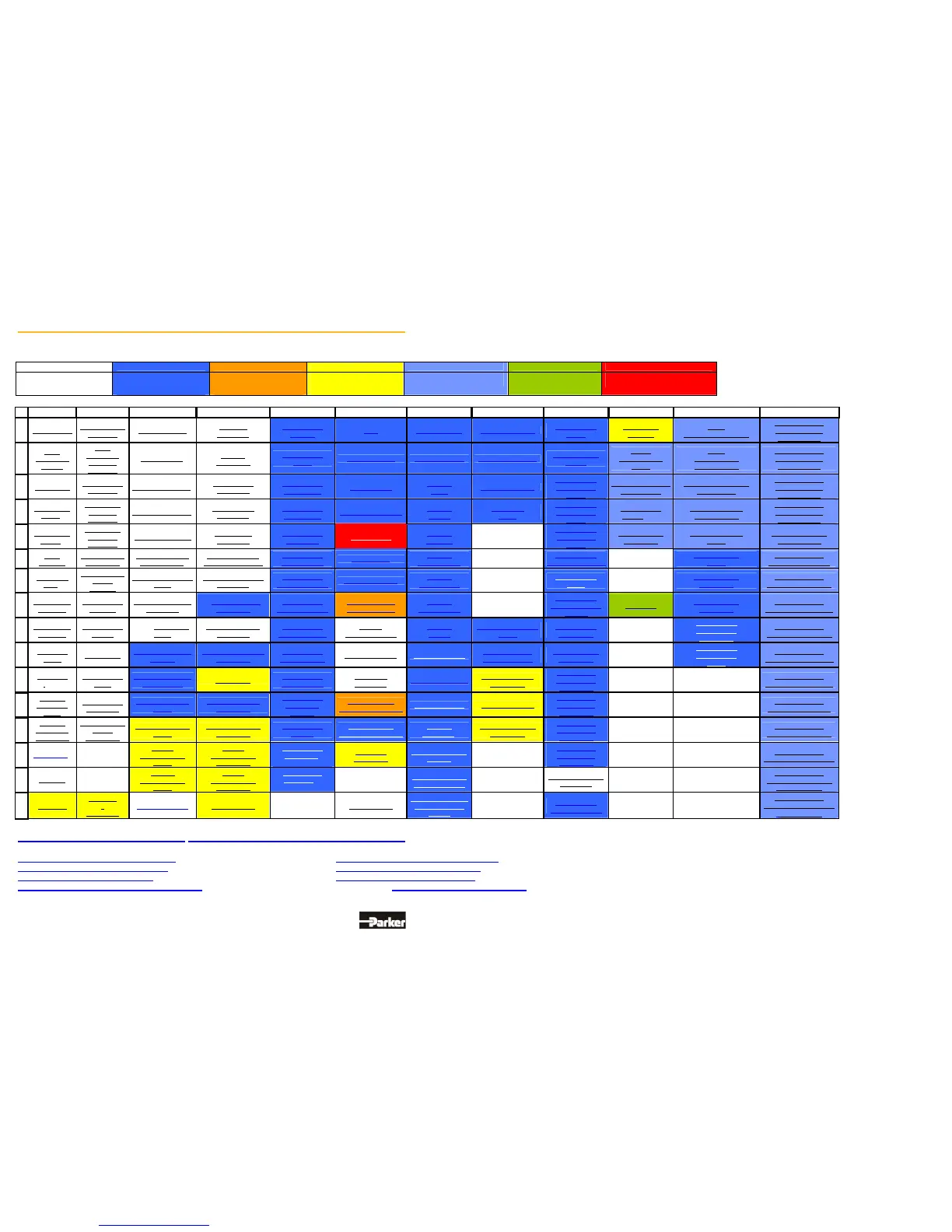
13.3 BIAS – Commands
Position = const.
[Variable X] = position BIAS-execution pointer [Variable X] =flag Y Profile value = [variable X] Save table PLC-program
This command is only permitted
in the BIAS- task
This command is permitted in
the BIAS, PLC and MATH-
Task
This command is only
permitted in the PLC and
MATH-Task
This command is only
permitted in the BIAS and PLC
-Task
This command is only permitted
in the MATH-Task
This command is only
permitted in the MATH-Task
This command is only permitted in the
BIAS and MATH-Task
0
Move position
Move position +
parameter
Position = const.
Position =
[variable X]
[Variable X] =
position
NOP Flag X = const. If input X ? const.
[Variable X] =
const.
Mathematic
program
Table
[[variable X]] = const.
[D_Variable X] =
[D_Variable Y]+
[D_Variable Z]
1
Move
incremental
position
Move
incremental
position +
parameter
Speed = const.
Speed =
[variable X]
[Variable X] =
speed
End of program If flag X ? const. If output X ? const.
If [variable X] ?
const.
Profile
initialization =
const.
Table
[[variable X]] =
[Y_Variable Z]
[D_Variable X] =
[D_Variable Y] -
[D_Variable Z]
2
Move datum
Move datum +
parameter
Acceleration = const.
Acceleration =
[Variable X]
[Variable X] =
acceleration
Sub- program
Flag X =
flag Y
Output X = const.
[Variable X] =
[variable Y] +
const.
Profile cycle length
= [variable X]
[X_Variable Y]= Table
[[variable Z]]
[D_Variable X] =
[D_Variable Y] *
[D_Variable Z]
3
Move infinite
positive
Move infinite
positive +
parameter
Deceleration = const.
Deceleration =
[variable X]
[Variable X] =
deceleration
End of Sub-program
Flag X =
input Y
Output X =
flag Y
[Variable X] =
[variable Y] –
const.
[Variable X] =
profile value
[ W_Variable X] =
[ Y_Variable Z]
[D_Variable X] =
[D_Variable Y] /
[D_Variable Z]
4
Move infinite
negative
Move infinite
negative +
parameter
Gear factor = const.
Gear factor =
[Variable X]
[Variable X] =
gear factor
PLC-program
Flag X =
output Y
_____________
[Variable X] =
[variable Y] *
const.
Profile value =
[variable X]
[ X_ Variable Y] =
const.
If [D_Variable X] ?
[D_Variable Y]
5
Move
synchron
Move synchron
+ parameter
"Position reached"
window = const.
“Position reached“
window =[variable X]
[Variable X] =
block number
Jump const.
Flag X =
flag Y & flag Z
_____________
[Variable X] =
[variable Y] / const.
_____________
[Variable [X]] =
const.
[D_Variable X] =
SIN {[D_Variable Y]}
6
Move CAM
profile
Move analogue
value +
integrator
Remaining position =
const.
Remaining position =
[variable X]
[Variable X] =
actual position Y
Jump [variable X]
Flag X =
flag Y | flag Z
_____________
[Variable X] =
flag Y
_____________
[Variable [X]] =
[variable Y]
[D_Variable X] =
COS {[D_Variable Y]}
7
settings 1
Move speed +
integrator
Ramp filter = const.,
[variable X]
Maximal current =
[variable X]
[Variable X] =
analogue input Y
BIAS-Execution
pointer = const.
Flag X =
flag Y ^ flag Z
_____________
[Variable X] =
[variable Y].bit Z
number
Save table
[Variable [X]] =
[variable Y]
[D_Variable X] =
SQRT {[D_Variable Y]}
8
settings 2
Move speed +
variable
Actual position X =
const.
Actual position X =
[variable Y]
[Variable X] =
latch position Y
Wait for
”position reached”
Flag X =
! flag Y
IBT- mask number =
const.
[Variable X] =
[variable Y]
_____________
[Variable X] =
[variable Y] ?
[variable Z]
[D_Variable X] =
ASIN {[D_Variable Y]}
9
Move PID;
speed
Execute PID
If actual position X
? const.
Analogue output X =
[variable Y]
[Variable X] =
actual speed Y
Wait time = const.
Flag X = status Y
IBT- notification
number = const.
If [variable X] ?
[variable Y]
_____________
[Variable X] =
[variable Y] ?
const.
[D_Variable X] =
ACOS {[D_Variable Y]}
A
Move PID;
torque
Cycle length =
const.
If actual position X
? [variable Y]
PID scaling
[Variable X] =
latch status Y
Wait time =
[variable X]
If status X ? const.
CAN Command =
[variable X]
[Variable X]=
[variable Y] +
[variable Z]
_____________ _____________
[D_Variable X] =
ATAN {[D_Variable Y]}
B
Set point
[axis no.] =
const.
Cycle length =
[variable X]
Sensor window =
const.
Sensor window =
[variable X]
[Variable X] =
position Y;
axis no.
BIAS-execution
pointer = [variable X]
Mode X = const. IBT- data transfer
[Variable X]=
[variable Y] -
[variable Z]
______________ ____________
[D_Variable X] =
EXP {[D_Variable Y]}
C
Set point
[axis no.] =
[variable X ]
Load parameter
set X =
[variable[Y]]
Sensor position =
const.
Sensor position =
[variable X]
[Variable X] =
value Y
Jump [var.[X]];
length = const.; from
Flag X =
[variable Y]
CAN2 Command =
[variable X]
[Variable X]=
[variable Y] *
[variable Z]
_____________ _____________
[D_Variable X] =
LOG {[D_Variable Y]}
D
Move relative _____________
Sensor
adjustment 1 =
const.
Sensor
adjustment 1 =
[variable X]
[Variable X] =
axis status,
axis no. Y
Execute X
commands
[Variable X]. bit[Y]
= const.
_____________
[Variable X]=
[variable Y] /
[variable Z]
_____________ _____________
[D_Variable X] =
LOG10 {[D_Variable Y]}
Sensor
adjustment 2 =
const.
Sensor
adjustment 2 =
[variable X]
[Variable X] =
parameter Y,
axis no. Z
_____________
If [var. X]. bit Y ==
const. then jump
_____________
[Teachvariable X] =
[variable Y]
_____________ _____________
[D_Variable X] =
POW {[D_Variable Y],
Stop axis
Stop axis
+
parameter
Update parameter PID parameter _____________ Virtual program
Axis state, axis no.
X, bit Y = const.,
[flag Z]
_____________
[Variable X] =
[teachvariable Y]
_____________ _____________
[D_Variable X] =
ATAN2 {[D_Variable Y],
[D_Variable Z]}
Command group “Move commands“ Command group “Program control commands“
Command group “Parameter commands“ Command group “Mathematic commands“
Command group “Variable commands“ Command group “Output commands“
Command group “Flag commands“ Command group “CAN- Commands“
Command group “Conditional jump commands“ Command group “637f commands“
This manual was downloaded on www.sdsdrives.com
+44 (0)117 938 1800 - info@sdsdrives.com

 Loading...
Loading...





