Functions
8.12 PID Controller
Control Units CU240S
Operating Instructions, 11/2006, A5E00766042B AA
8-57
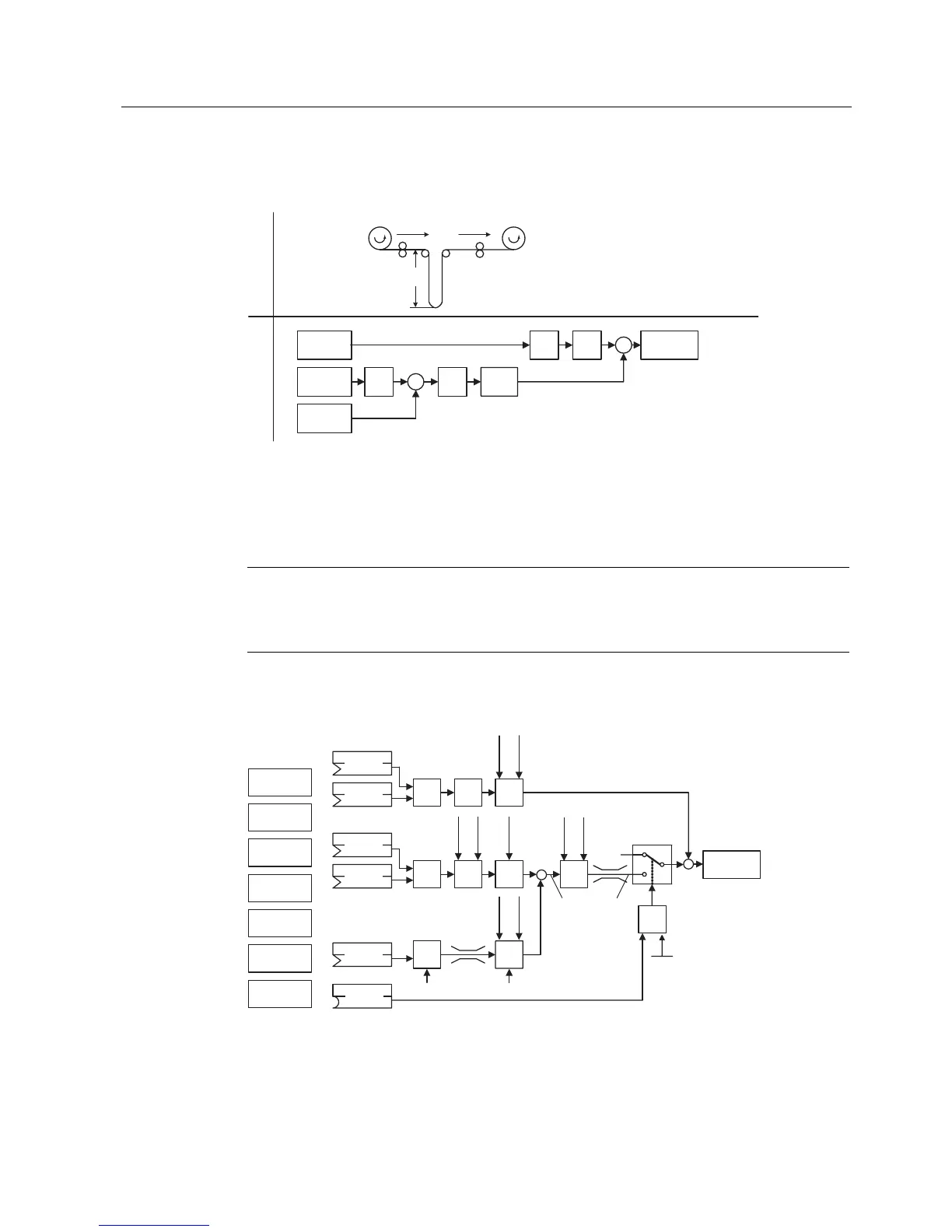
Using the PID dancer roll control, with SINAMICS G120 it is possible to ensure that
continuous material webs have a constant tension.
Y
Y
Y
[
[
[
680
VHWSRLQW
0RWRU
FRQWURO
3,'
VHWSRLQW
3,'
IHHGEDFN
3,'
5)*
3,'
OLPLW
3,'
$)0 5)*
6WUXFWXUH $SSOLFDWLRQ
Figure 8-38 PID dancer roll control
The velocity v
1
is assumed to be an independent disturbance; the input velocity v
2
should be
controlled using motor rolls A
2
so that the length x
2
of the loop corresponds, as far as
possible, to the setpoint.
Note
When selecting the closed-loop dancer roll control it should be noted that neither PID-MOP
nor PID-FF should be used - but instead the MOP (motorized potentiometer) or the FF (fixed
frequencies).
The structure and important parameters for the PID dancer roll control are shown below.
023
$,
))
866RQ
56
866RQ
56
)LHOGEXV
$,
3
3
3
3
3
3
680
3,'
680
3,'
37
3
$)0
3,'
5)*
5)*
3,'
37
3,'
6&/
3
3,'
0RWRU
FRQWURO
3,'
3
3
3
3
3
3
3
3
3
3
∆
3,' 2XWSXW
B
Figure 8-39 Structure of the closed-loop PID-dancer roll control
 Loading...
Loading...






