Using PID_Temp
6.2 Configuring PID_Temp
PID control
174 Function Manual, 03/2017, A5E35300227-AC
The PID parameters are displayed in the "PID Parameters" configuration window.
If cooling is activated in the basic settings and PID parameter switching is selected as the
method for heating/cooling in the output settings, two parameter sets are available: One for
heating and one for cooling.
In this case, the PID algorithm decides on the basis of the calculated output value and the
control deviation whether the PID parameters for heating or cooling are used.
If cooling is deactivated or the cooling factor is selected as the method for heating/cooling,
the parameter set for heating is always used.
During tuning, the PID parameters are adapted to the controlled system with the exception of
the dead zone width that has to be configured manually.
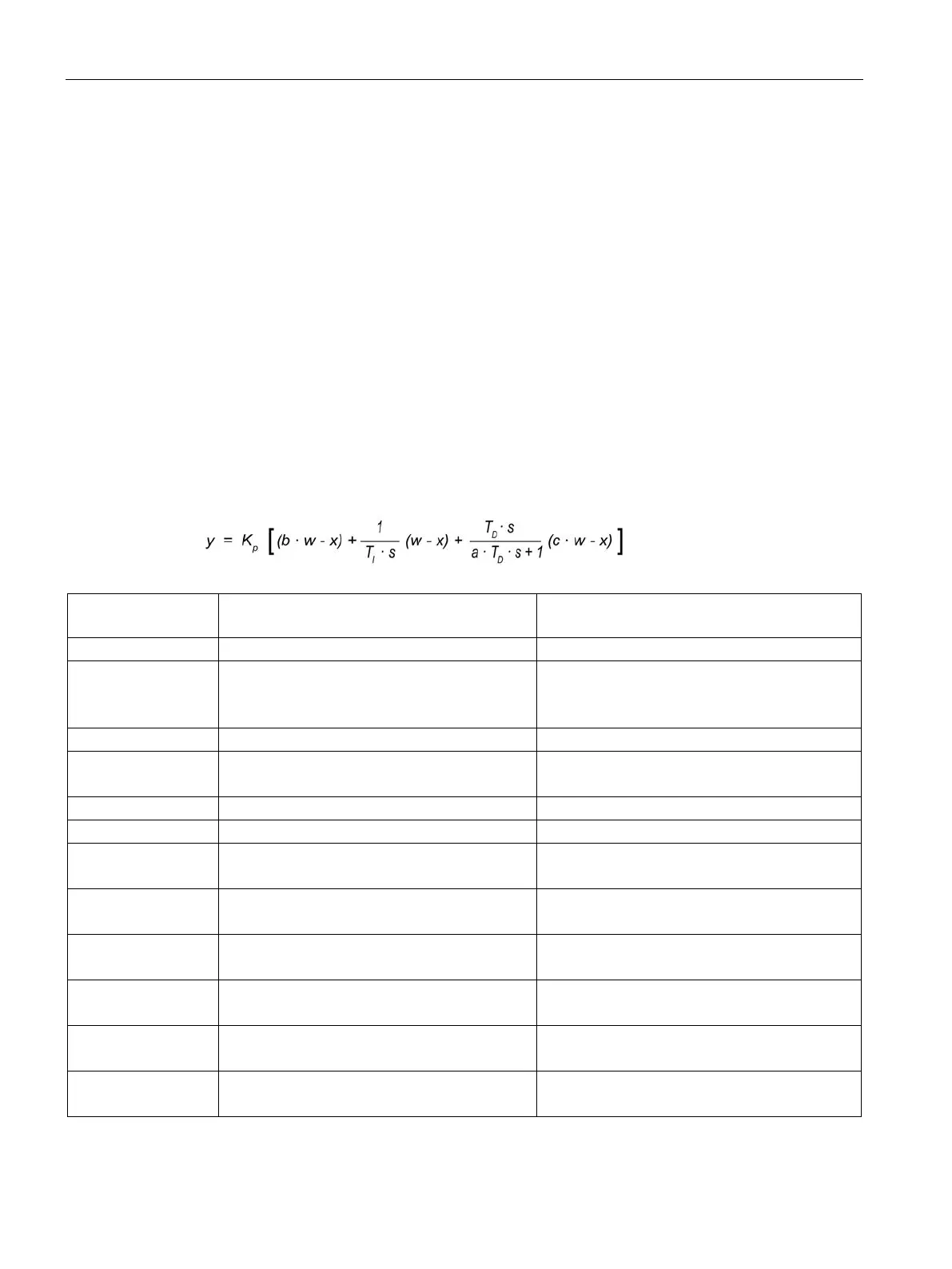
PID_Temp is a PIDT1 controller with anti-windup and weighting of the proportional and
derivative actions.
The PID algorithm operates according to the following equation (control zone and dead zone
deactivated):
Associated parameters of the PID_Temp instruc-
tion
y Output value of the PID algorithm -
K
p
Proportional gain Retain.CtrlParams.Heat.Gain
Retain.CtrlParams.Cool.Gain
b Proportional action weighting Retain.CtrlParams.Heat.PWeighting
Retain.CtrlParams.Cool.PWeighting
T
I
Integral action time Retain.CtrlParams.Heat.Ti
Retain.CtrlParams.Cool.Ti
T
D
Derivative action time Retain.CtrlParams.Heat.Td
Retain.CtrlParams.Cool.Td
a Coefficient for derivative-action delay
(Derivative delay T1 = a × T
D
)
Retain.CtrlParams.Heat.TdFiltRatio
Retain.CtrlParams.Cool.TdFiltRatio
c Derivative action weighting Retain.CtrlParams.Heat.DWeighting
Retain.CtrlParams.Cool.DWeighting
DeadZone Dead zone width Retain.CtrlParams.Heat.DeadZone
Retain.CtrlParams.Cool.DeadZone
ControlZone Control zone width Retain.CtrlParams.Heat.ControlZone
Retain.CtrlParams.Cool.ControlZone
 Loading...
Loading...




















