Instructions
9.3 PID_Temp
PID control
Function Manual, 03/2017, A5E35300227-AC
395
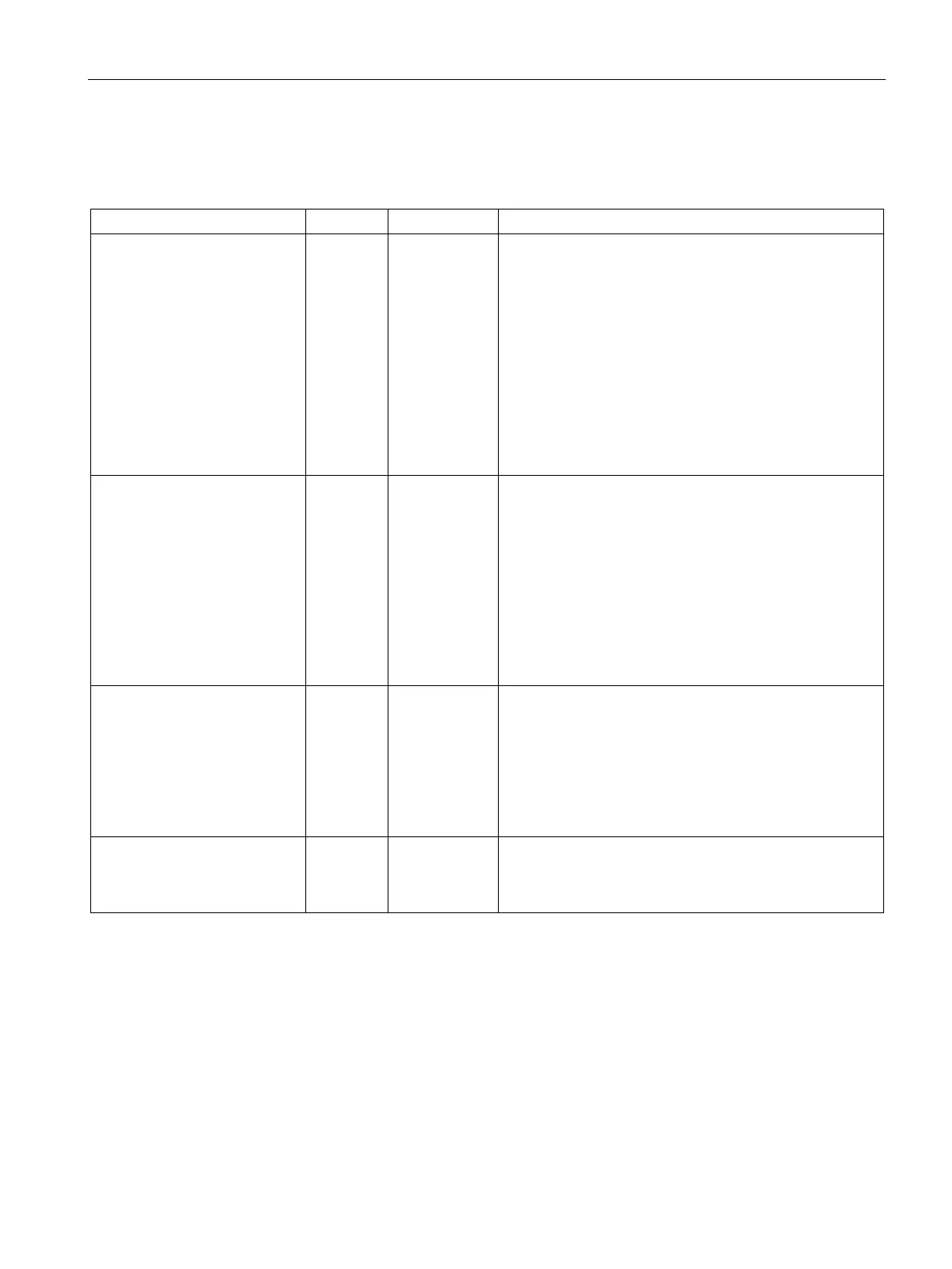
You must not change tags that are not listed. These are used for internal purposes only.
IntegralResetMode Int V1.0: 1,
V1.1 or higher:
4
The IntegralResetMode tag (Page 447) determines how
the integral action PIDCtrl.IOutputOld is pre-assigned
when switching from "Inactive" operating mode to "Auto-
matic mode".
This setting only works for one cycle.
• IntegralResetMode = 0: Smooth
• IntegralResetMode = 1: Delete
• IntegralResetMode = 2: Hold
• IntegralResetMode = 3: Pre-assign
• IntegralResetMode = 4: Like setpoint change (only for
PID_Temp with version ≥ 1.1)
OverwriteInitialOutputValue REAL 0.0 If one of the following conditions is met, the integral action
PIDCtrl.IOutputOld is pre-assigned automatically as if
PIDOutputSum = OverwriteInitialOutputValue in the previ-
ous cycle:
• IntegralResetMode = 3 when switching from "Inactive"
operating mode to "Automatic mode"
• TRUE -> FALSE edge at parameter Reset and param-
eter Mode = 3
• PIDCtrl.PIDInit = TRUE in "Automatic mode" (available
as of PID_Temp version 1.1)
RunModeByStartup BOOL TRUE Activate operating mode at Mode parameter after CPU
restart
• If RunModeByStartup = TRUE, PID_Temp starts in the
operating mode saved in the Mode parameter after
CPU startup.
• If RunModeByStartup = FALSE, PID_Temp remains in
"Inactive" mode after CPU startup.
LoadBackUp BOOL FALSE If LoadBackUp = TRUE, the last set of PID parameters is
reloaded from the CtrlParamsBackUp structure. The set
was saved prior to the last tuning. LoadBackUp is auto-
matically set back to FALSE. The acceptance is bumpless.
 Loading...
Loading...




















