Instructions
9.4 PID basic functions
PID control
488 Function Manual, 03/2017, A5E35300227-AC
In/out parameters TCONT_CP
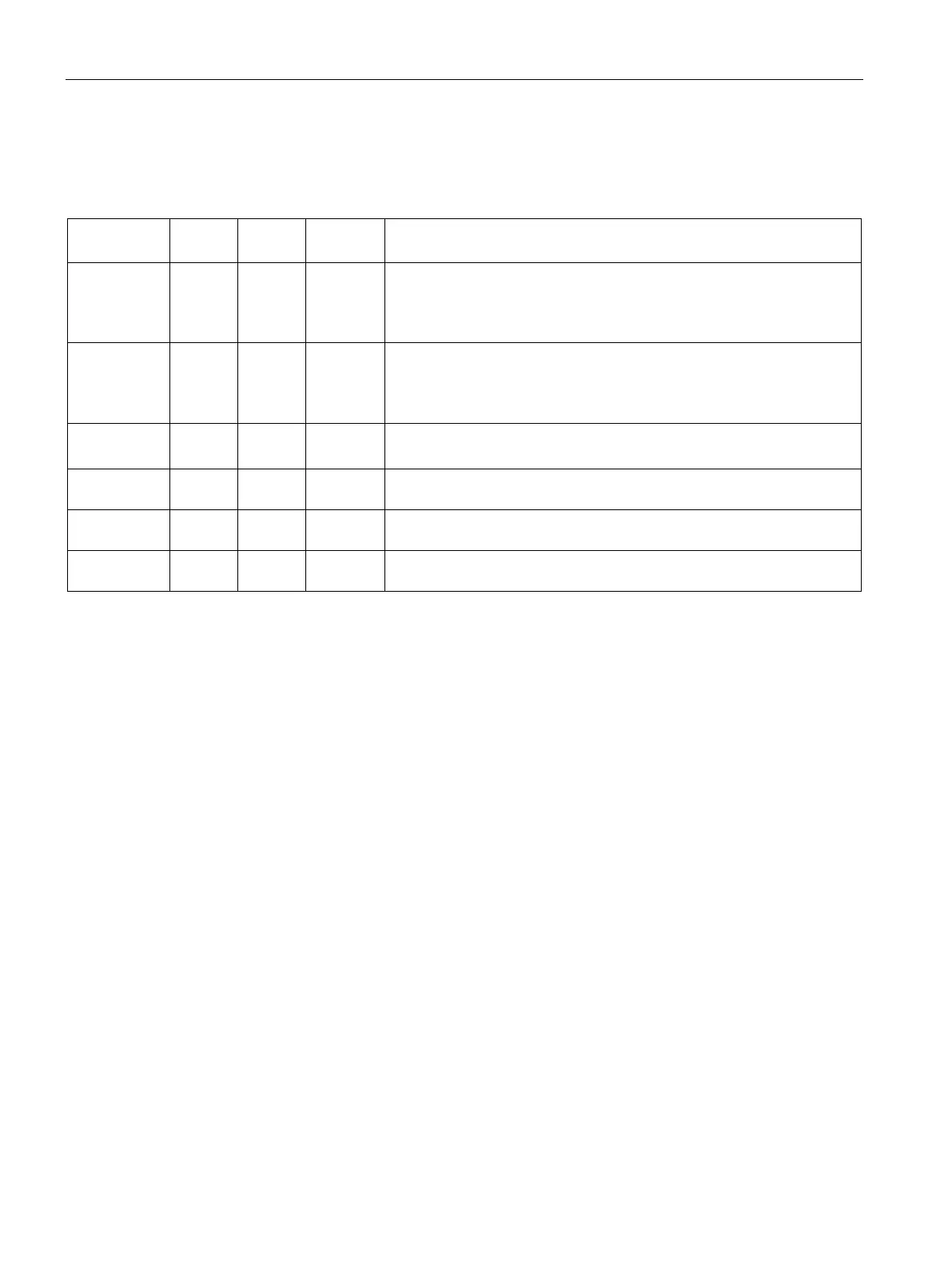
Table 9- 21 In/out parameters TCONT_CP
CYCLE 26.0 REAL 0.1 s Sets the sampling time for the PID algorithm. In phase 1, the tuner calcu-
lates
the sampling time and enters it in CYCLE.
CYCLE_P 30.0 REAL 0.02 s At this input, you set the sampling time for the pulse shaper action. In
phase 1, the TCONT_CP instruction calculates the sampling time and
enters it in CYCLE_P.
SP_INT 34.0 REAL 0.0 The input "Internal setpoint" is used to specify a setpoint.
The valid values depend on the sensors used.
MAN 38.0 REAL 0.0 The "Manual value" input is used to set a manual value. In automatic
mode, it tracks the manipulated value.
COM_RST 42.0 BOOL FALSE The block has an initialization routine that is processed when the
MAN_ON 42.1 BOOL TRUE If the input "Enable manual mode" is set then the control loop is inter-
rupted. The manual value MAN is set as manipulated value.
Operating principle of the pulse generator (Page 481)
Block diagram TCONT_CP (Page 484)
 Loading...
Loading...




















