Instructions
9.4 PID basic functions
PID control
494 Function Manual, 03/2017, A5E35300227-AC
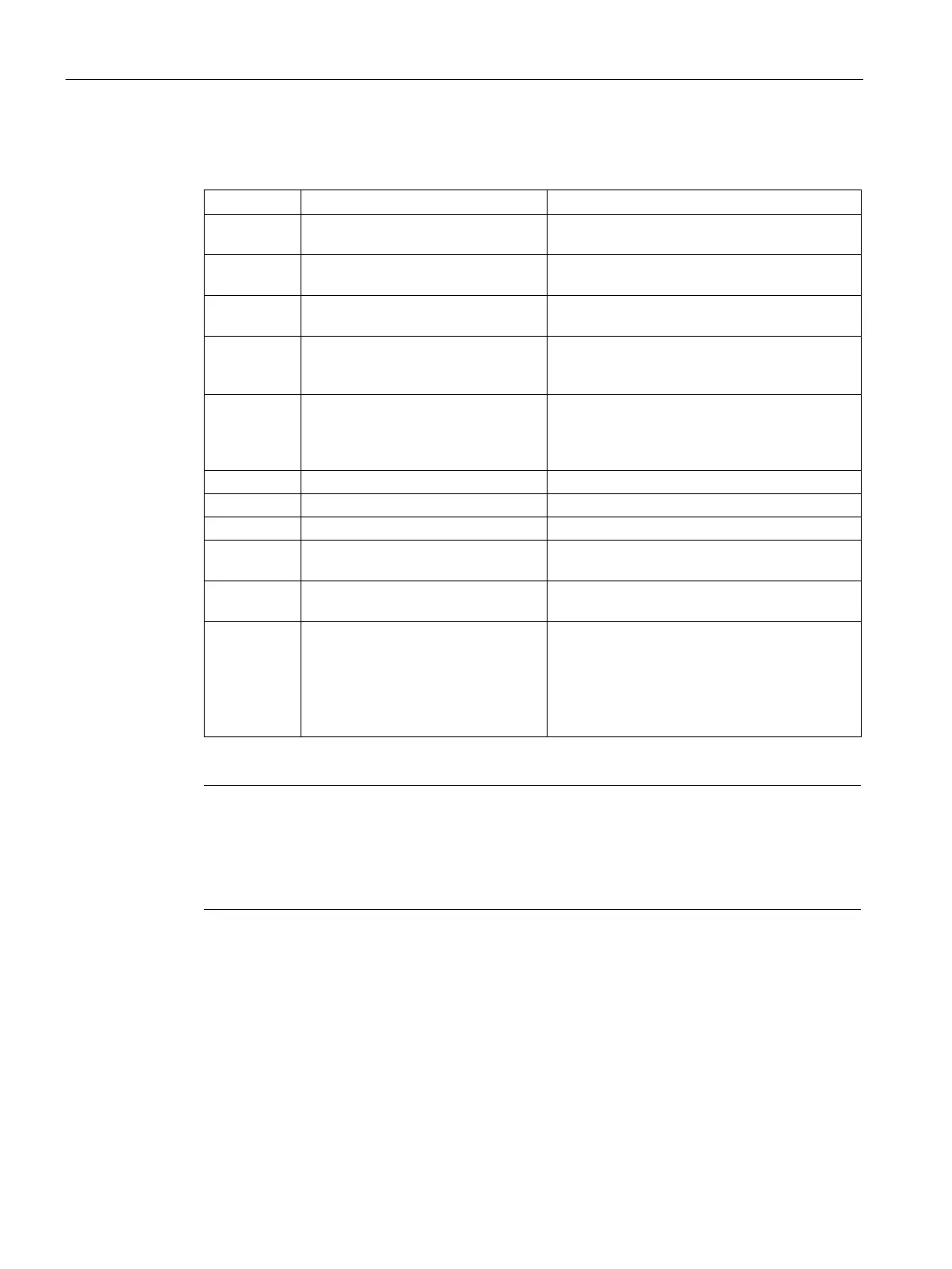
0 Default, or no/no new controller
10000 Tuning completed + suitable control-
2xxxx Tuning completed + controller pa-
2xx2x Point of inflection not reached (only
if excited via setpoint step-change)
If the controller oscillates, weaken the control-
ler parameters, or repeat the test with a smaller
manipulated value difference TUN_DLMN.
2x1xx Estimation error (TU < 3*CYCLE) Reduce CYCLE and repeat attempt.
Special case for PT1-only process: Do not
repeat test, if necessary reduce controller pa-
Estimation error TU too high
Repeat test under better conditions.
Estimation error N_PTN < 1
Repeat test under better conditions.
Estimation error N_PTN > 10
Repeat test under better conditions.
3xxxx Tuning canceled in phase 1 owing to
faulty parameter assignment:
30002 Effective manipulated value differen-
Correct manipulated value differential
30005 The sampling times CYCLE and
CYCLE_P differ by more than 5% of
the measured values.
Compare CYCLE and CYCLE_P with the cycle
time of the cyclic interrupt priority class and
note any loop scheduler.
Check CPU load. An excessively loaded CPU
can result in prolonged sampling times that are
inconsistent with CYCLE or CYCLE_P.
Note
If you cancel tuning in phase 1 or
2, STATUS_H = 0 is set. However, STATUS_D still
displays the status of the last controller calculation.
The higher the value of STATUS_D, the
higher the order of the control process, the greater
the TU/TA ratio and the gentler the controller parameters will be.
Operating principle of the pulse generator (Page 481)
Block diagram TCONT_CP (Page 484)
 Loading...
Loading...




















