Instructions
9.1 PID_Compact
PID control
286 Function Manual, 03/2017, A5E35300227-AC
If errors occur, they are output in parameter Error, and PID_Compact changes to "Inactive"
mode. Reset the errors using the Reset parameter.
An increase of the output value is generally intended to cause an increase in the process
value. This is referred to as a normal control logic. For cooling and discharge control
systems, it may be necessary to invert the control logic. PID_Compact does not work with
negative proportional gain. If InvertControl = TRUE, an increasing control deviation causes a
reduction in the output value. The control logic is also taken into account during pretuning
and fine tuning.
Control mode V1 (Page 97)
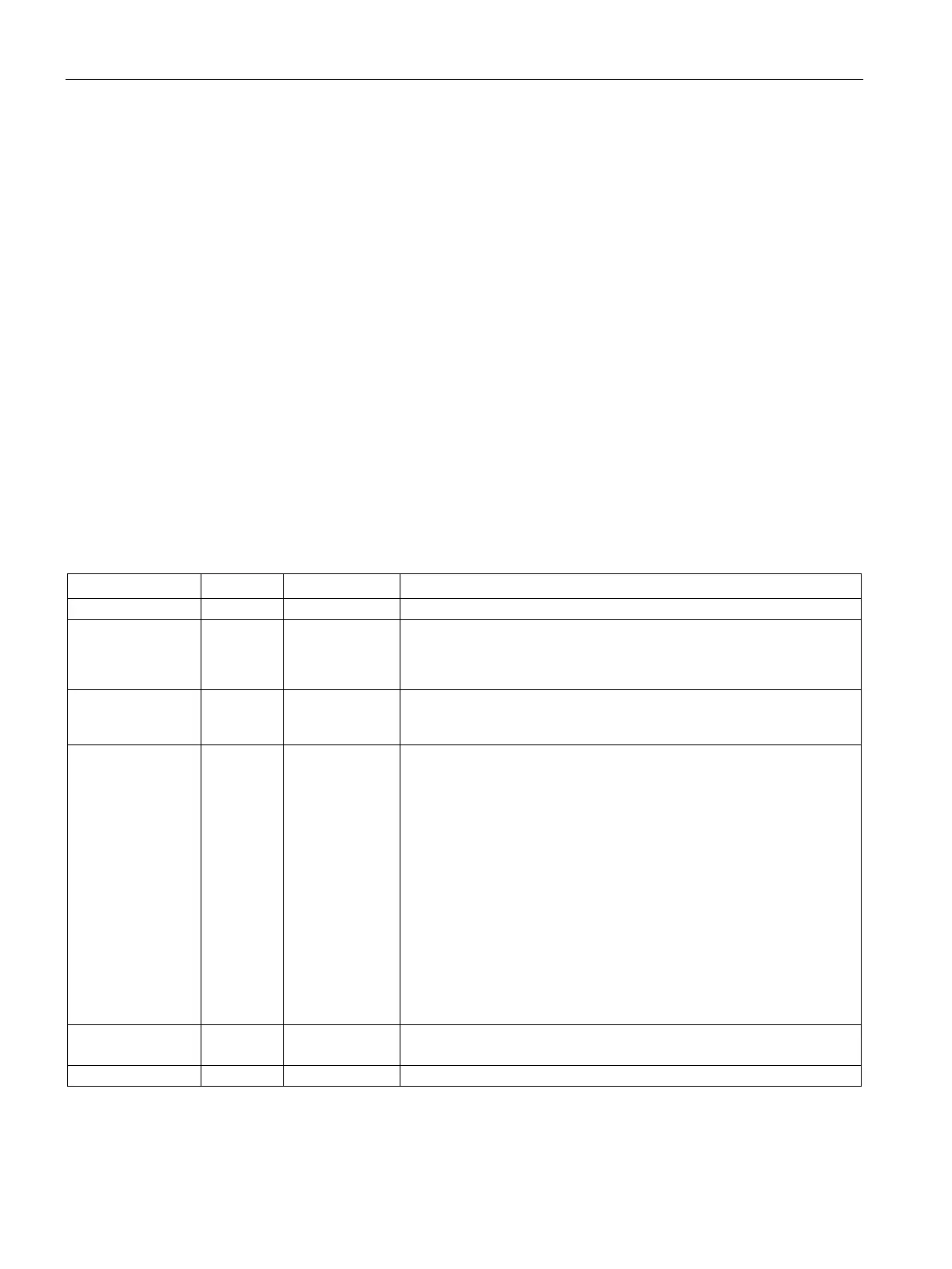
Input parameters of PID_Compact V1
Table 9- 4 Input parameters of PID_Compact V1
Setpoint of the PID controller in automatic mode
A variable of the user program is used as source for the process val-
ue.
If you are using parameter Input, then
sPid_Cmpt.b_Input_PER_On = FALSE must be set.
Analog input as the source of the process value
If you are using parameter Input_PER, then
sPid_Cmpt.b_Input_PER_On = TRUE must be set.
•
A FALSE -> TRUE edge selects "Manual mode", while State = 4,
sRet.i_Mode remains unchanged.
• A TRUE -> FALSE edge selects the most recently active operating
mode, State =sRet.i_Mode
A change of sRet.i_Mode will not take effect during ManualEnable =
TRUE. The change of sRet.i_Mode will only be considered upon a
TRUE -> FALSE edge at ManualEnable .
PID_Compact V1.2 und PID_Compact V1.0
If at start of the CPU ManualEnable = TRUE, PID_Compact starts in
manual mode. A rising edge (FALSE > TRUE) at ManualEnable is not
necessary.
At the start of the CPU, PID_Compact only switches to manual mode
with a rising edge (FALSE->TRUE) at ManualEnable . Without rising
edge, PID_Compact starts in the last operating mode in which Manu-
Manual value
This value is used as the output value in manual mode.
The Reset parameter (Page 298) restarts the controller.
 Loading...
Loading...




















