Instructions
9.3 PID_Temp
PID control
378 Function Manual, 03/2017, A5E35300227-AC
Description of PID_Temp
Description
The PID_Temp instruction provides a PID controller with integrated tuning for temperature
processes. PID_Temp can be used for pure heating or heating/cooling applications.
The following operating modes are possible:
● Inactive
● Pretuning
● Fine tuning
● Automatic mode
● Manual mode
● Substitute output value with error monitoring
For a more detailed description of the operating modes, see the State parameter.
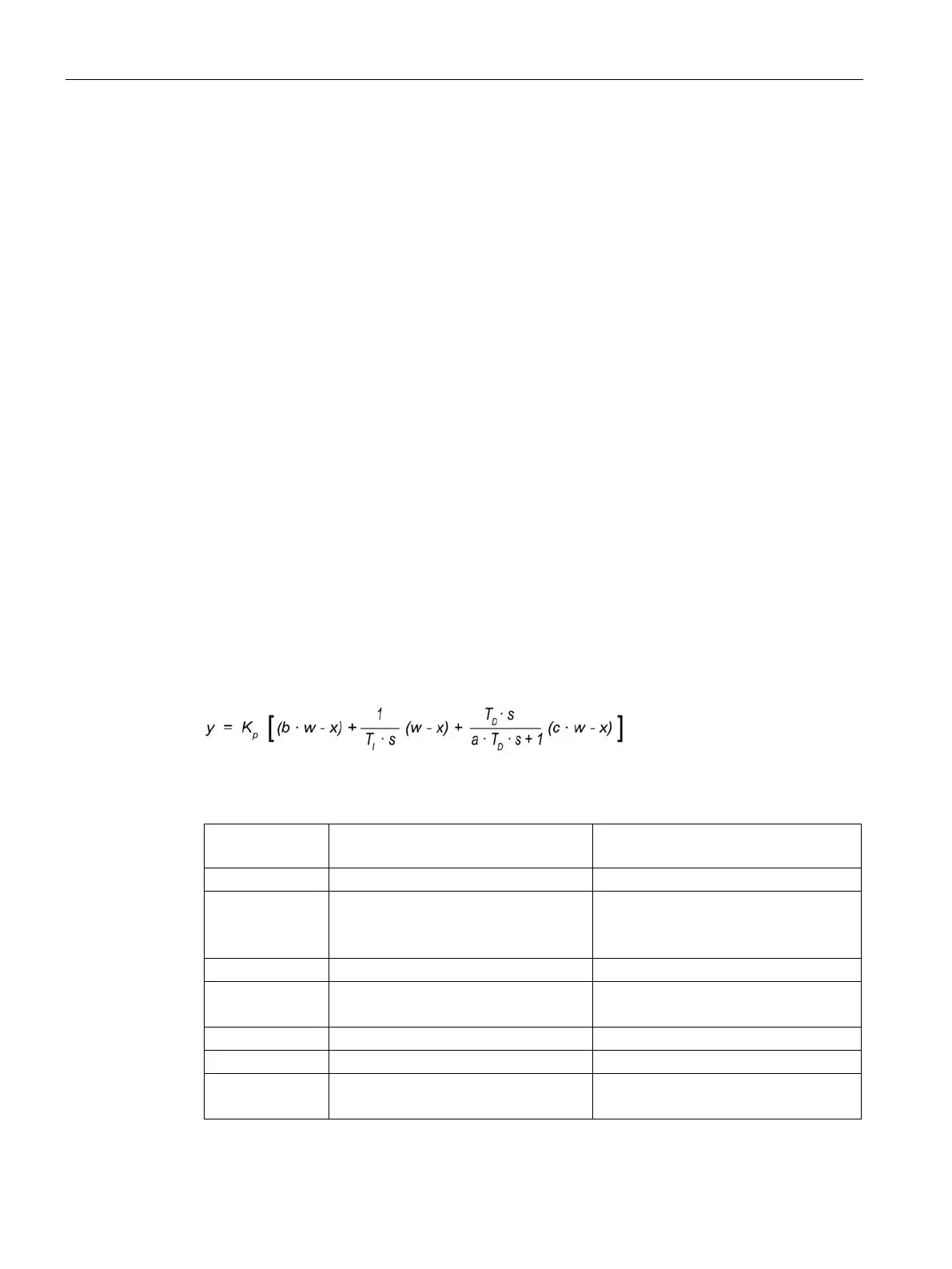
PID_Temp is a PIDT1 controller with anti-windup and weighting of the proportional and
derivative actions. The PID algorithm operates according to the following equation (control
zone and dead zone deactivated):
The table below shows the meaning of the icons used in the equation and in the subsequent
figures.
Associated parameters of the
PID_Temp instruction
y Output value of the PID algorithm -
K
p
Proportional gain Retain.CtrlParams.Heat.Gain
Retain.CtrlParams.Cool.Gain
b Proportional action weighting Retain.CtrlParams.Heat.PWeighting
Retain.CtrlParams.Cool.PWeighting
T
I
Integral action time Retain.CtrlParams.Heat.Ti
Retain.CtrlParams.Cool.Ti
 Loading...
Loading...




















