Using PID_Temp
6.6 Override control with PID_Temp
PID control
204 Function Manual, 03/2017, A5E35300227-AC
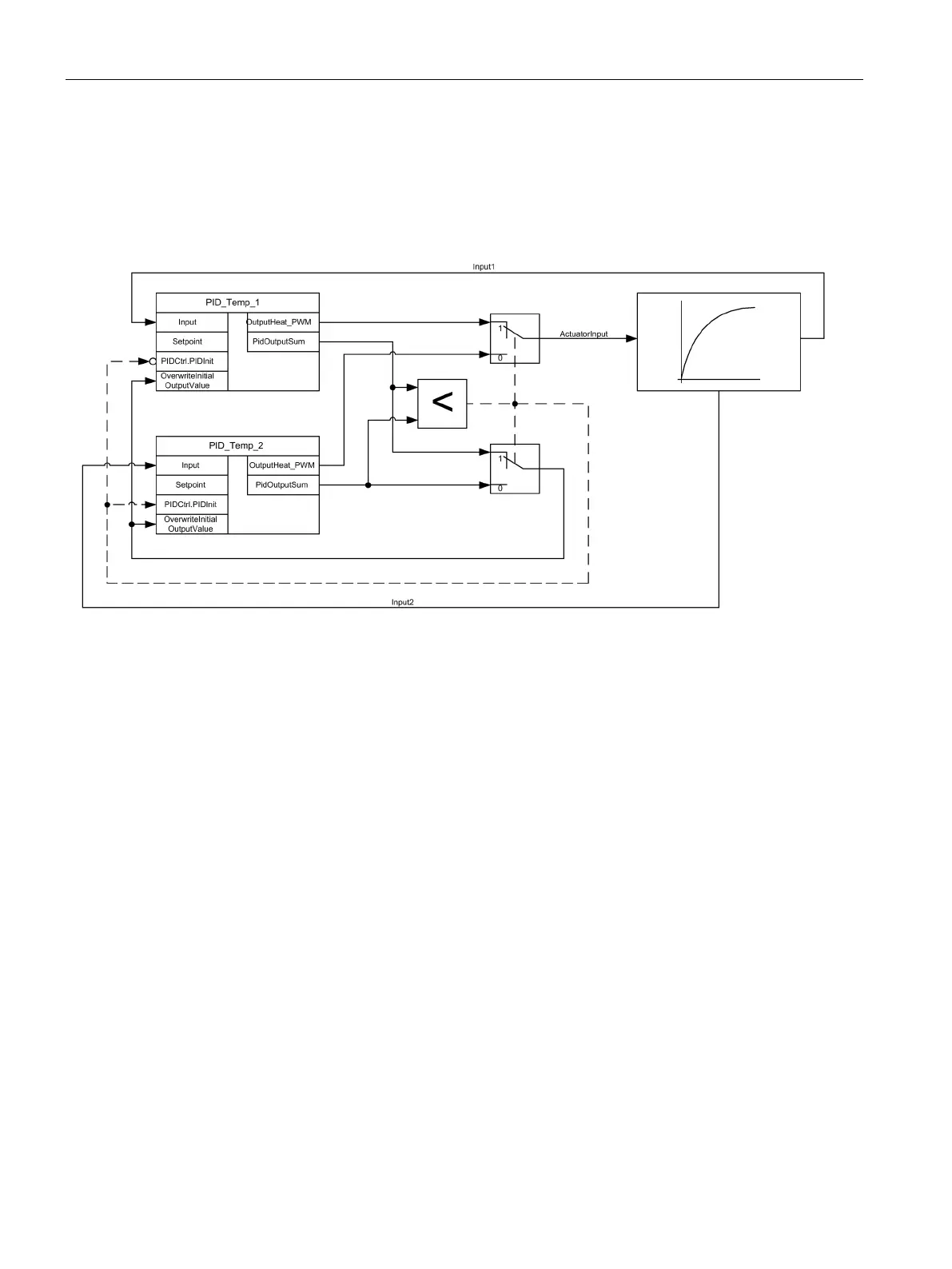
The heater is controlled with the pulse-width modulated output value of PID_Temp
(parameter OutputHeat_PWM) by writing the program tag ActuatorInput. The setpoint for the
temperature Input1 is specified at the parameter PID_Temp_1.Setpoint. The temperature
high limit for the additional measuring point is specified as setpoint at the parameter
PID_Temp_2.Setpoint.
Both controllers must share one heater as shared actuator. The logic that decides which
controller gets access to the actuator is implemented by a minimum selection of the PID
output value (in Real format, parameter PidOutputSum) in this case. Because the PID output
value corresponds to the heating power, the controller that requires lower heating power gets
the control.
In normal operation of the plant, the process value of the main controlled variable
corresponds to the setpoint. The main controller PID_Temp_1 has settled on a stationary
PID output value PID_Temp_1.PidOutputSum. The process value of the limiting controller
Input2 in normal operation is significantly below the high limit that is specified as setpoint for
für PID_Temp_2. The limiting controller therefore wants to increase the heating power to
increase its process value, which means it will calculate a PID output value
PID_Temp_2.PidOutputSum that is greater than the main controller
PID_Temp_1.PidOutputSum. The minimum selection of the switchover logic therefore gives
the main controller PID_Temp_1 continued access to the actuator. In addition, it is ensured
that PID_Temp_2 is updated by means of the assignments
PID_Temp_2.OverwriteInitialOutputValue = PID_Temp_1.PidOutputSum and
PID_Temp_2.PIDCtrl.PIDInit = TRUE.
If Input2 now approaches the high limit or exceeds it, for example due to a fault, the limiting
controller PID_Temp_2 calculates a smaller PID output value to restrict the heating power
and thus reduce Input2. If PID_Temp_2.PidOutputSum is smaller than
PID_Temp_1.PidOutputSum, the limiting controller PID_Temp_2 receives access to the
actuator through the minimum selection and reduces the heating power. It is ensured that
PID_Temp_1 is updated by means of the assignments
PID_Temp_1.OverwriteInitialOutputValue = PID_Temp_2.PidOutputSum and
PID_Temp_1.PIDCtrl.PIDInit = TRUE.
 Loading...
Loading...




















