Using PID basic functions
7.3 TCONT_CP
PID control
Function Manual, 03/2017, A5E35300227-AC
233
Quality of measuring signals (measurement noise, low-frequency interference)
The results of tuning can be distorted by measurement noise or by low-frequency
interference. Note the following:
● If you encounter measurement noise, set the sampling frequency higher rather than
lower. During one noise period, the process value should be sampled at least twice. In
pulse mode, integrated mean value filtering can be helpful. This assumes, however, that
the process variable PV is transferred to the instruction in the fast pulse cycle. The
degree of noise should not exceed 5% of the useful signal change.
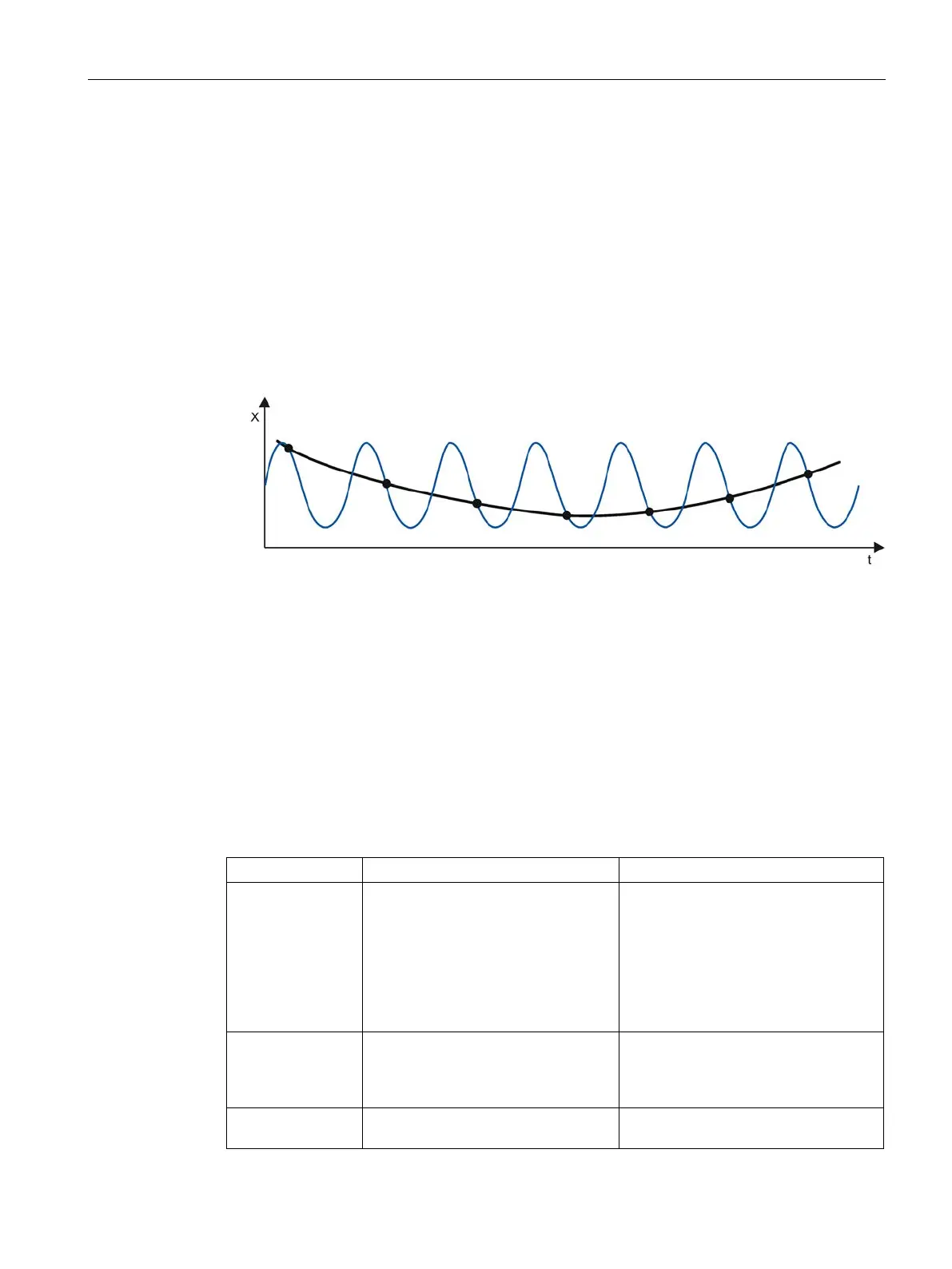
● High-frequency interference cannot be filtered out by TCONT_CP. This should be filtered
earlier in the measuring sensor to prevent the aliasing effect.
The following schematic illustrates the aliasing effect when the sampling time is too long:
● With low-frequency interference, it is relatively easy to ensure an adequately high
sampling rate. However, the TCONT_CP must then generate a uniform measuring signal
by having a large interval in the mean value filtering. Mean value filtering must extend
over at least two noise periods. Internally in the block, this soon results in higher sampling
times such that the accuracy of the tuning is adversely affected. Adequate accuracy is
guaranteed with at least 40 noise periods up to the point of inflection.
Possible remedy when repeating the attempt:
Increase TUN_DLMN.
Overshoot can occur in the following situations:
End of tuning
• Excitation by a too high manipu-
lated value change compared with
the setpoint step change (see
above).
• PI controller activated by
PID_ON = FALSE.
• Increase the setpoint step change
or reduce the manipulated value
step change.
• If the process permits a PID control-
ler, start tuning with PID_ON
= TRUE.
Tuning in phase 7 Initially, less aggressive controller
parameters were determined (process
type III); these can lead to an over-
-
Control mode PI controller with PFAC_SP = 1.0 for
If the process permits a PID controller,
start tuning with PID_ON = TRUE.
 Loading...
Loading...




















