Instructions
9.1 PID_Compact
PID control
284 Function Manual, 03/2017, A5E35300227-AC
During controller tuning and in automatic mode, PID_Compact 1.0 is set to "Inactive"
operating mode under the following conditions:
● New mean value >= 1.1 x old mean value
● New mean value <= 0.9 x old mean value
● Current sampling time >= 1.5 x current mean value
● Current sampling time <= 0.5 x current mean value
Sampling time of the PID algorithm
The controlled system needs a certain amount of time to respond to changes in the output
value. It is therefore not advisable to calculate the output value in every cycle. The sampling
time of the PID algorithm represents the time between two calculations of the output value. It
is calculated during tuning and rounded to a multiple of the cycle time. All other functions of
PID_Compact are executed at every call.
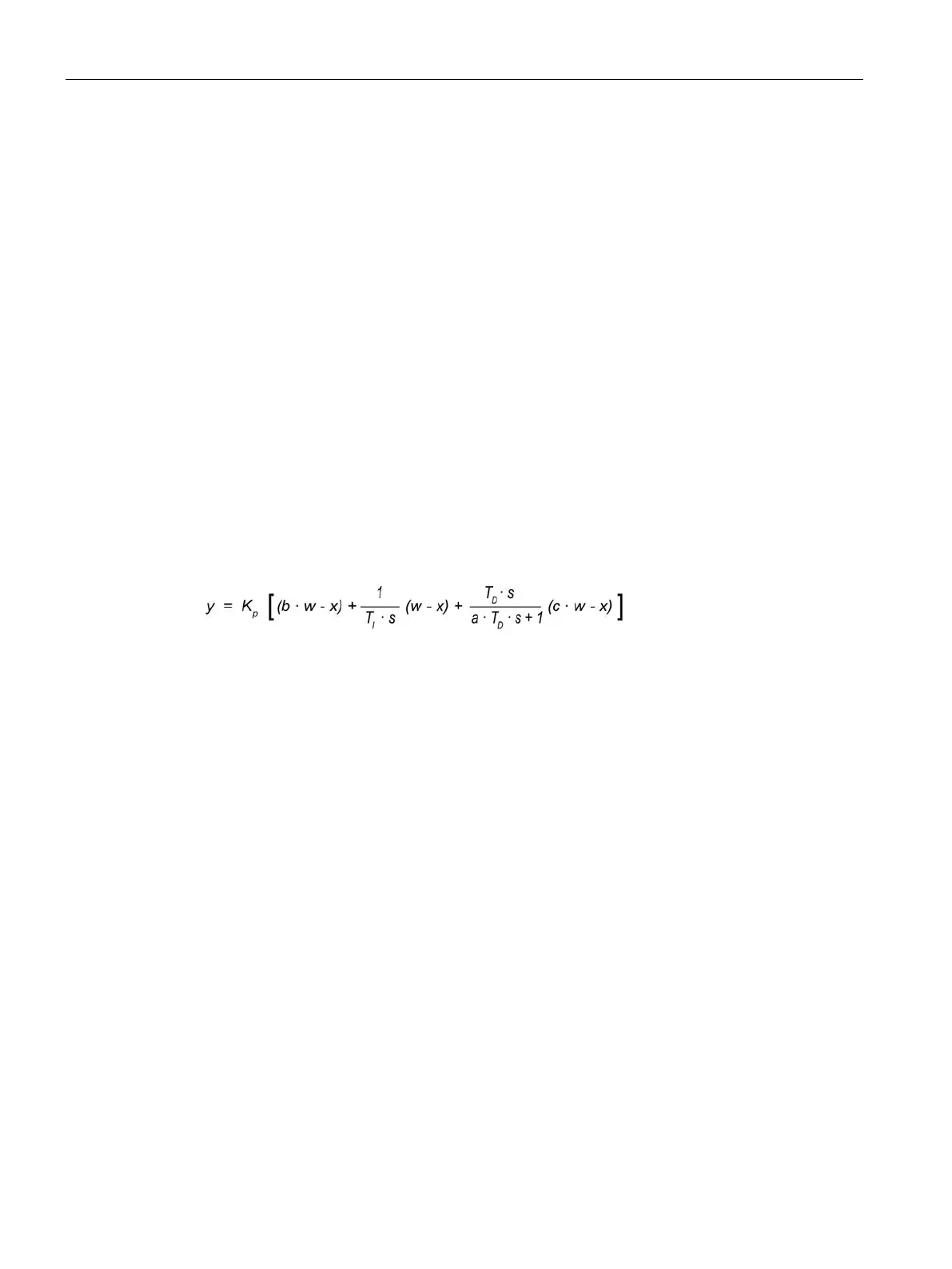
PID_Compact is a PIDT1 controller with anti-windup and weighting of the proportional and
derivative actions. The following equation is used to calculate the output value.
Proportional action weighting
Derivative delay coefficient (T1 = a × T
D
)
Derivative action weighting
 Loading...
Loading...




















