Instructions
9.2 PID_3Step
PID control
Function Manual, 03/2017, A5E35300227-AC
307
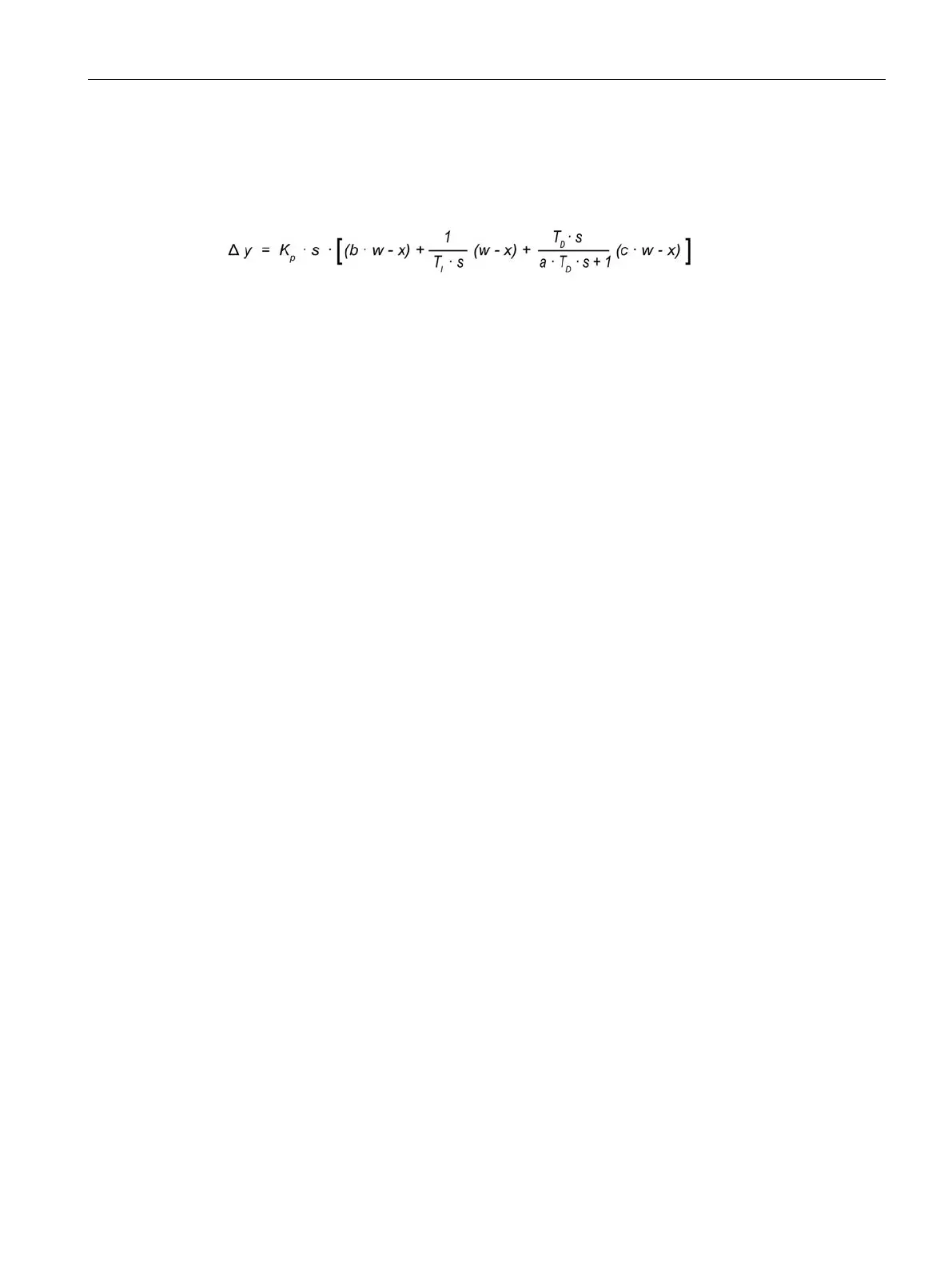
PID_3Step is a PIDT1 controller with anti-windup and weighting of the proportional and
derivative actions. The PID algorithm operates according to the following equation:
Output value of the PID algorithm
Proportional action weighting
Derivative delay coefficient (derivative delay T1 = a × T
D
Derivative action weighting
 Loading...
Loading...




















