Instructions
9.2 PID_3Step
PID control
360 Function Manual, 03/2017, A5E35300227-AC
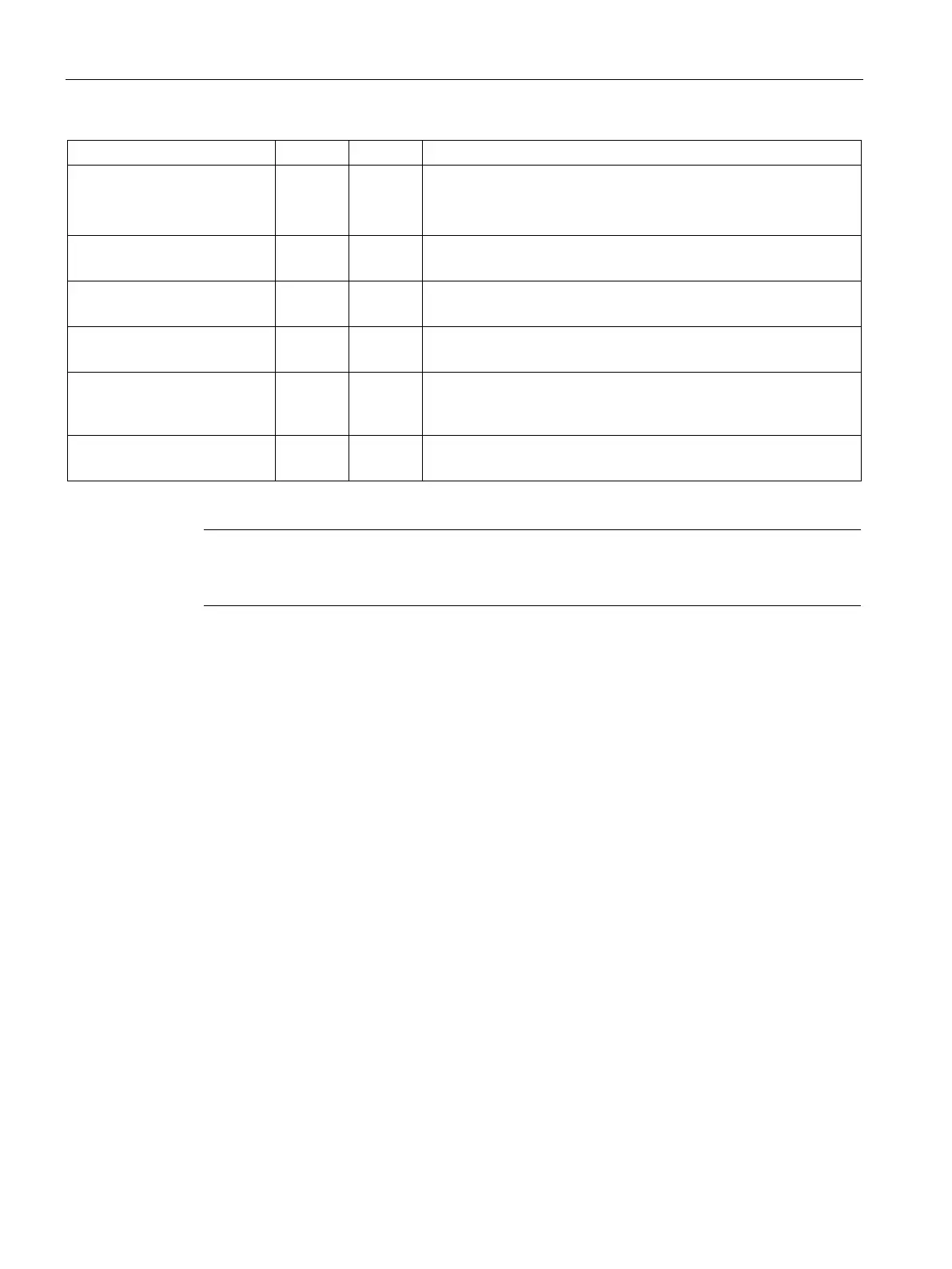
Retain.CtrlParams.Td REAL 0.0
• Td > 0.0: Active derivative action time
• Td = 0.0: Derivative action is deactivated
Retain.CtrlParams.TdFiltRatio REAL 0.0 Active derivative delay coefficient
TdFiltRatio is retentive.
Retain.CtrlParams.PWeighting REAL 0.0 Active proportional action weighting
Retain.CtrlParams.DWeighting REAL 0.0 Active derivative action weighting
DWeighting is retentive.
Retain.CtrlParams.Cycle REAL 1.0 Active sampling time of PID algorithm in seconds, rounded to an
integer multiple of the cycle time of the calling OB.
Retain.CtrlParams.Input-
DeadBand
REAL 0.0 Dead zone width of the control deviation
InputDeadBand is retentive.
Note
Change the tags listed in this table in "Inactive" mode to prevent malfunction of the PID
controller. "Inactive" mode is forced by setting the "Retain.Mode" tag to "0".
Parameter State and Retain.Mode V1 (Page 361)
Tag ActivateRecoverMode V1 (Page 372)
Downloading technology objects to device (Page 44)
 Loading...
Loading...




















