Instructions
9.4 PID basic functions
PID control
Function Manual, 03/2017, A5E35300227-AC
475
PID Algorithm (GAIN, TI, TD, D_F)
The PID algorithm operates as a position algorithm. The proportional, integral (INT), and
derivative (DIF) actions are connected in parallel and can be activated or deactivated
individually. This allows P, PI, PD, and PID controllers to be configured.
Controller tuning supports PI and PID controllers. Controller inversion is implemented using
a negative GAIN (cooling controller).
If you set TI and TD to 0.0, you obtain a pure P controller at the operating point.
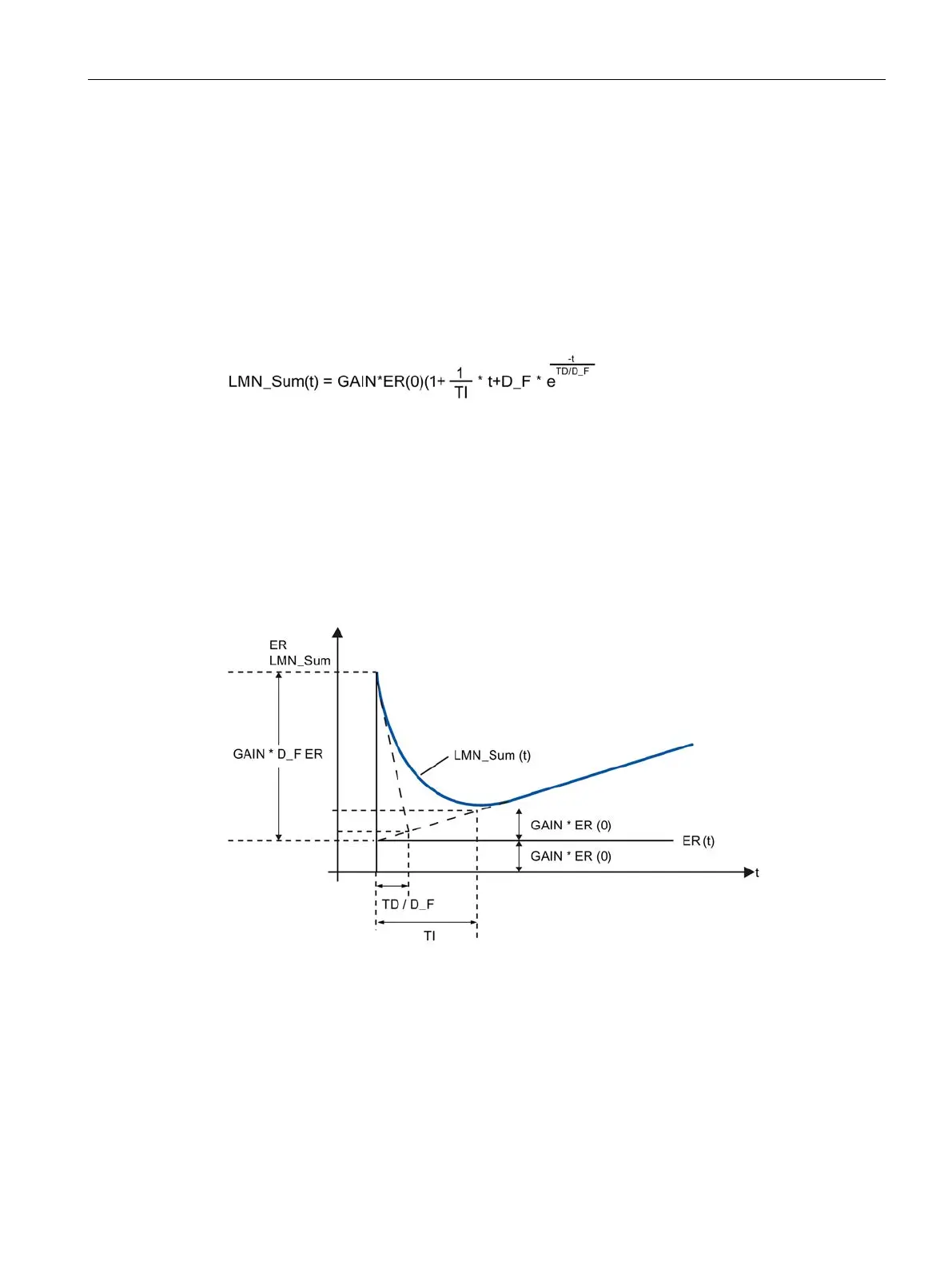
The step response in the time range is:
Where:
LMN_Sum(t) the manipulated variable in the controller's automatic mode
ER (0) is the step height of the normalized control deviation
GAIN is the controller gain
TI is the integration time
TD is the derivative action time
D_F is the derivative factor
 Loading...
Loading...




















