Configuration
5.3 Examples
1FN3 linear motors
122 Configuration Manual, 10/2018, 6SN1197-0AB86-0BP2
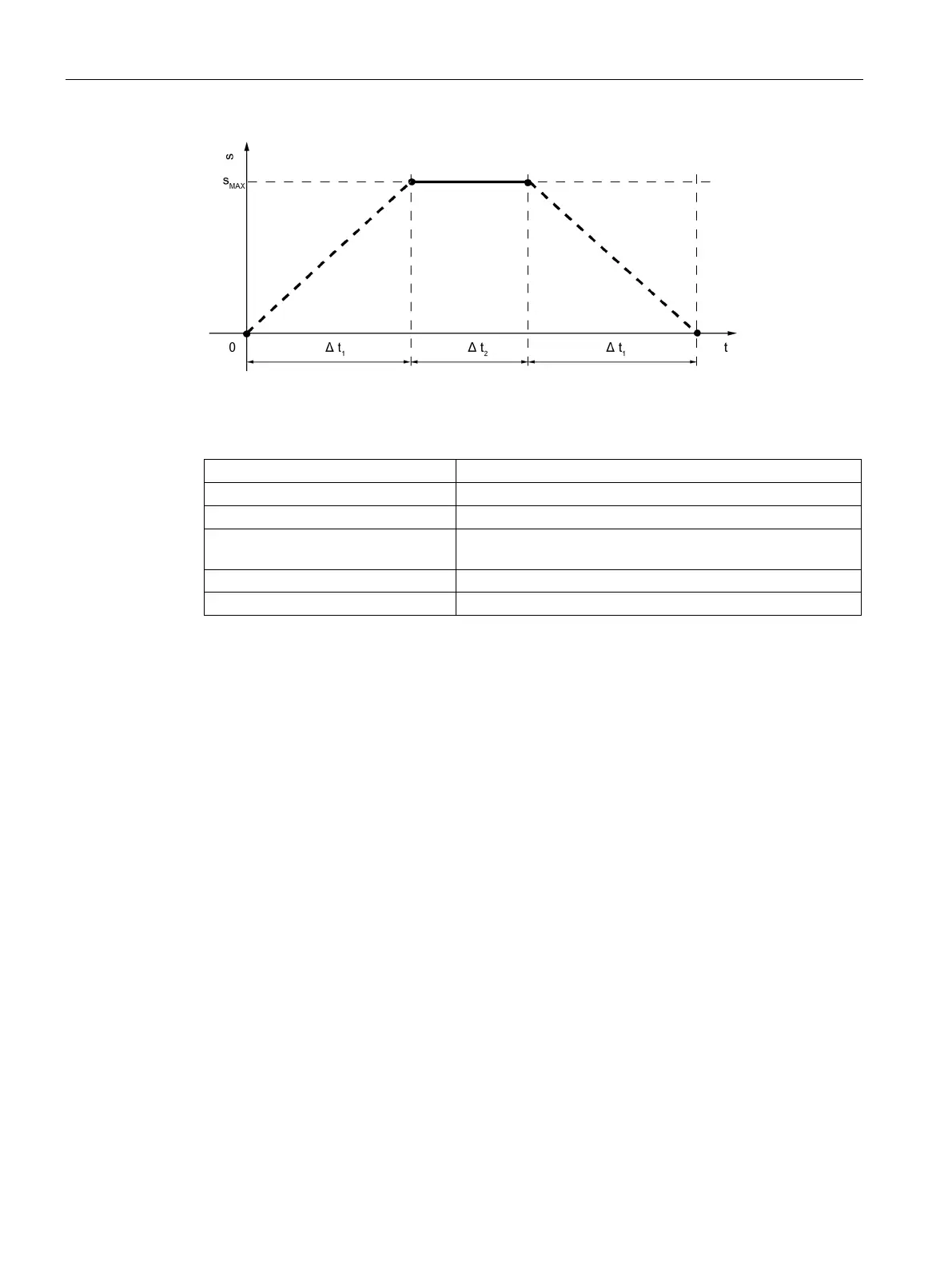
Figure 5-12 Example 1: Representation of the predefined variables in the distance-time diagram
The individual predefined variables are:
1
Mass to be moved
(without motor mass)
m = 50 kg
r
g
In addition, a power module is to be selected and the maximum infeed power calculated.
Constraints/specification of the duty cycle
Traversing profile – Example 1
The form of the traversing profile during time Δt
1
is not explicitly specified. Therefore, a
suitable traversing profile must first be specified.
The following example shows a traversing profile that is the simplest to implement: With this
profile, only one constant acceleration phase and one constant deceleration phase are
required to reach position s
MAX
, also see the figure below. This type of traversing profile has
the shortest positioning times.

 Loading...
Loading...