Communication via CAN bus (CANopen)
AP10
Date: 28.02.2022 Art. No. 86853 Mod. status 37/22 Page 18 of 78
For a detailed description of the telegram refer to the relevant CAN expert literature. For
simplification, only identifier (COB-ID) and data field will be dealt with in the subsequent
telegram descriptions.
5.2 Node control
5.2.1 Network management services (NMT)
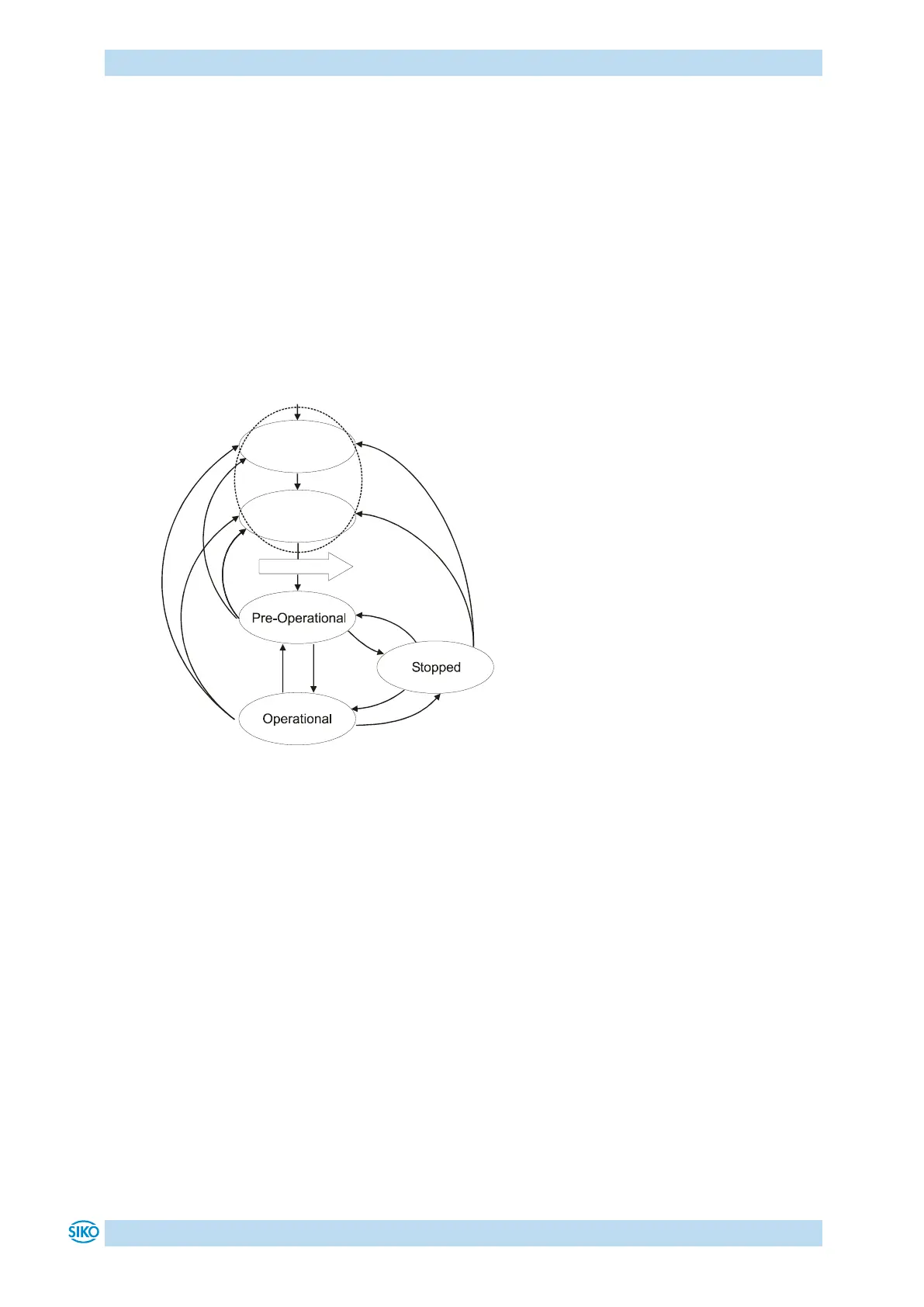
The master configures, manages and monitors network nodes via the NMT service. The device
is always in one of the four communication statuses "INITIALISATION", "PRE-OPERATIONAL",
"OPERATIONAL" or "STOPPED" (see Fig. 5).
Fig. 5: NMT status diagram
5.2.1.1 NMT communication statuses
NMT Status INITIALIZATION
The unit is not involved in the bus actions in this state. All hardware and software
components are initialised. This state is attained after switching on the device or after receipt
of the command code 81h of the own or global addresses. After receiving the command code
82h, the display is also in the initialization status. However, only the hardware and software
associated with CAN communication is reinitialized. The device automatically signifies
completion of initialization via a boot-up message. After successful transmission of the boot-
up message, the device will be in the "PRE-OPERATIONAL" status.
NMT Status PRE-OPERATIONAL
Parameterization data (SDO) can be exchanged in the Pre-Operational Mode. However, no
process data (PDO) is transferred.