Instruction Manual
for
AS380 Series Elevator Integrated Drive Controller
156
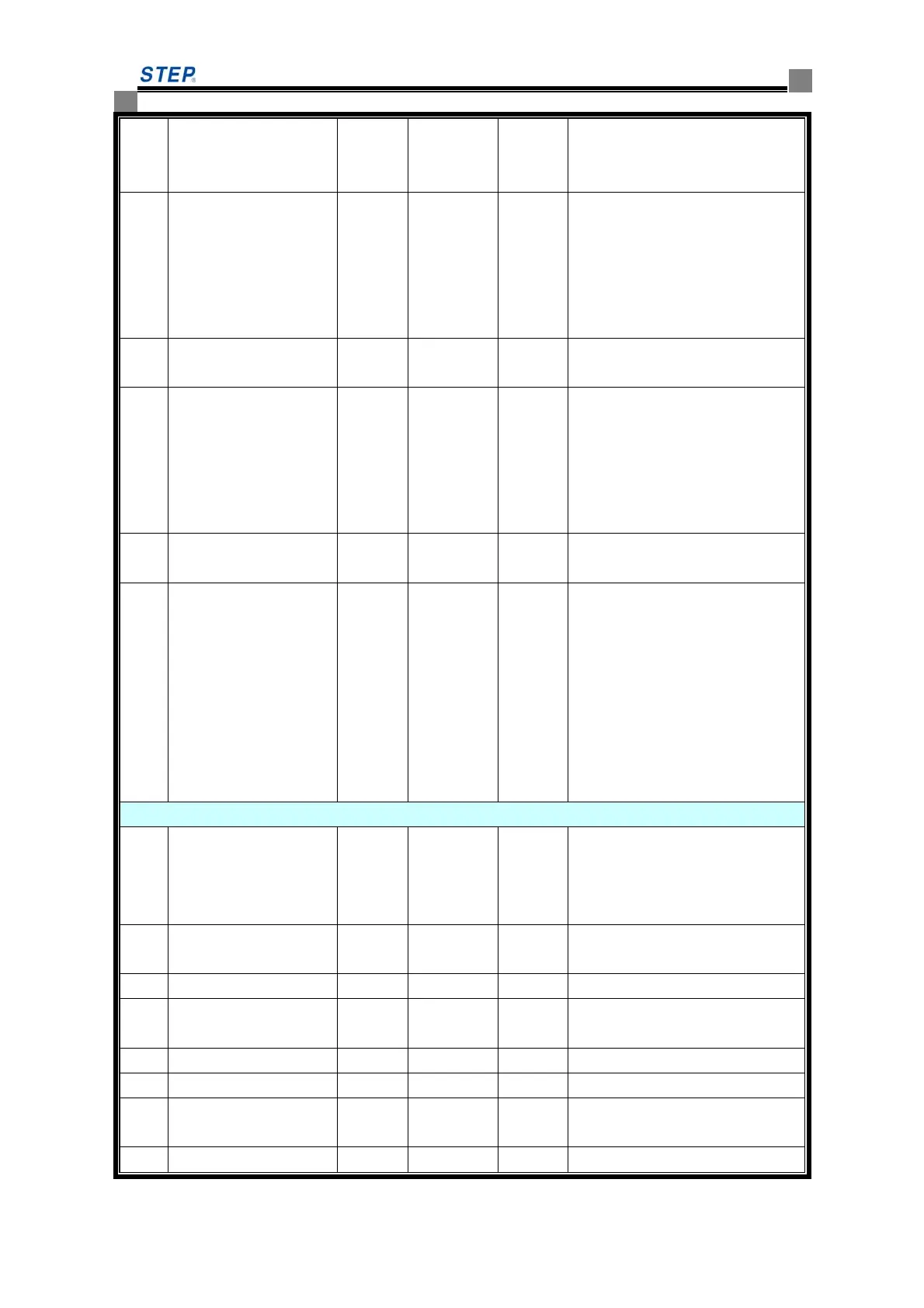
F250 Mutual inductor
0.0001
H
Mutual inductor of asynchronous
motor
F251
Motor low-speed
overcurrent threshold
1500 0~65535 0.1%
Motor stop and motor low-speed
onvercurrent reported in case that
the motor speed is lower than
20% of nominal speed, and the
value and time duration of current
surpass those of F252.
F252
Low-speed overcurrent
time
600 0~65535 0.1s
Duration of motor low-speed
overcurrent
F253
Motor high-speed
overcurrent threshold
1200 0~65535 0.1%
Motor stop and motor high-speed
overcurrent reported in case that
the motor speed is higher than
20% of nominal speed, and the
value and time duration of current
surpass those of F2524
F254
High-speed
overcurrent time
3000 0~65535 0.1s
Time duration of motor
high-speed overcurrent
F255
Frequency dividing
coefficient of encoder
( PG card required)
0 0~7
0: ( no frequency dividing), 1:( 2
frequency dividing), 2: (4
frequency dividing),3:(8
frequency dividing),
4: (16 frequency dividing),5 (32
frequency dividing),6:(64
frequency dividing), 7: (128
frequency dividing)
Note: ( PG card required)
When F245=6, F246~F255 have the following meanings
F246
Synchronous motor
study angle or not
when power on
1 0/1
Determine whether synchronous
motor conduct angle self-study or
not when power on , 0 for no
study, 1 for study
F247
Current gain when
self-study
150 0~400 %
Current gain when synchronous
motor conduct angle self-study
F248 Command option 2 0/1/2 Running command option
F249
Zero servo process
current loop gain
100 48~65535 %
Zero servo process current loop
gain
F250 Spare
F251 Spare
F252
Anti-slipping
parameter
6616 0~65535 6616:open anti-slipping function
F253 Spare
 Loading...
Loading...