Instruction Manual
for
AS380 Series Elevator Integrated Drive Controller
199
F225
Switching
frequency F1 at
high speed point
Set the switching frequency
parameter of PID regulator at high
speed point, which is based on a
percentage of nominal frequency. If
the rated frequency is 50Hz, the
required switching frequency F1 is
40Hz. Because 40HZ accounts for
80% of 50Hz, the data should be set
to 80
0.0~
100.0
%
50.0
See the following
description.
in the medium-speed
segment between F0 and
F1, PID regulation data is
automatically generated
y the system based on
the low and high-speed
PID
Parameters F215 ~ F217 are P, I and D values (P1, I1, D1) of the PID regulator at the
low-speed section, F218 ~ F220 are P, I and D values (P2, I2, D2 )of the PID regulator at the
medium-speed section, F221 ~ F223 are P, I and D values (P3, I3, D3) of the PID regulator at the
high-speed section. They play roles in different sections on the running curve during the entire
elevator operation (see Figure 8.3). Parameters F224 and F225 are switching frequency between
partitions (see Figure 8.3). Adjust Parameters F215 ~ F217, F218 ~ F220 and F221 ~ F223 and
F224 and F225 to improve respectively the comfort of the elevator when running through different
sections.
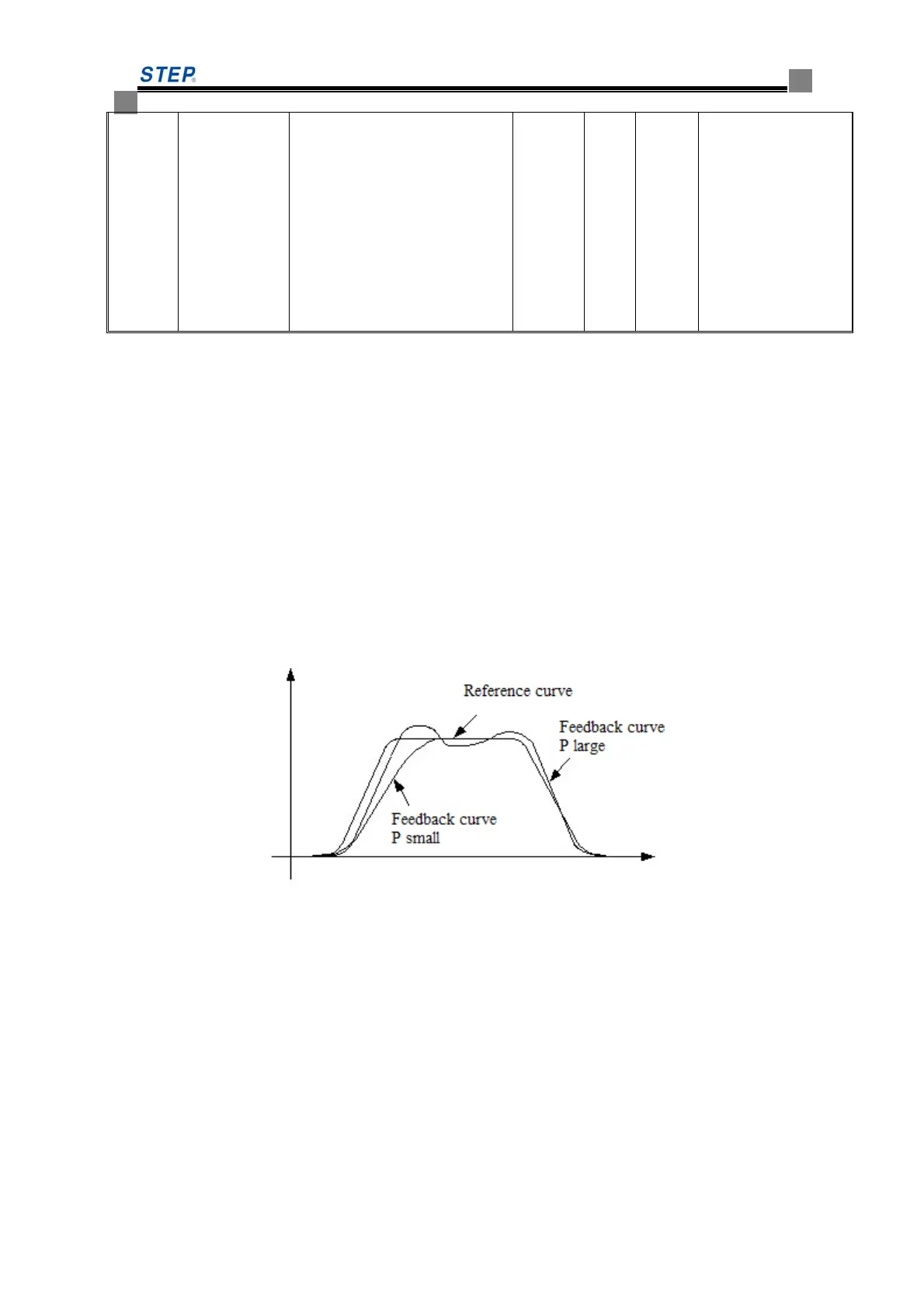
Increase of the proportional constant P can enhance the system's dynamic response. But if P
is too large, it may generate overshoot and oscillation of the system. The impact of P on the
feedback tracking is as shown below.
Impact of P (Propotional Constant) on the Feedback Tracking
Increase of the integral constant I can enhance the system's dynamic response. Increase I if
the overshoot is too large or the dynamic response is too long. But if I is too large, it may generate
overshoot and oscillation of the system. The impact of P on the feedback tracking is as shown
below.
 Loading...
Loading...