Instruction Manual
for
AS380 Series Elevator Integrated Drive Controller
200
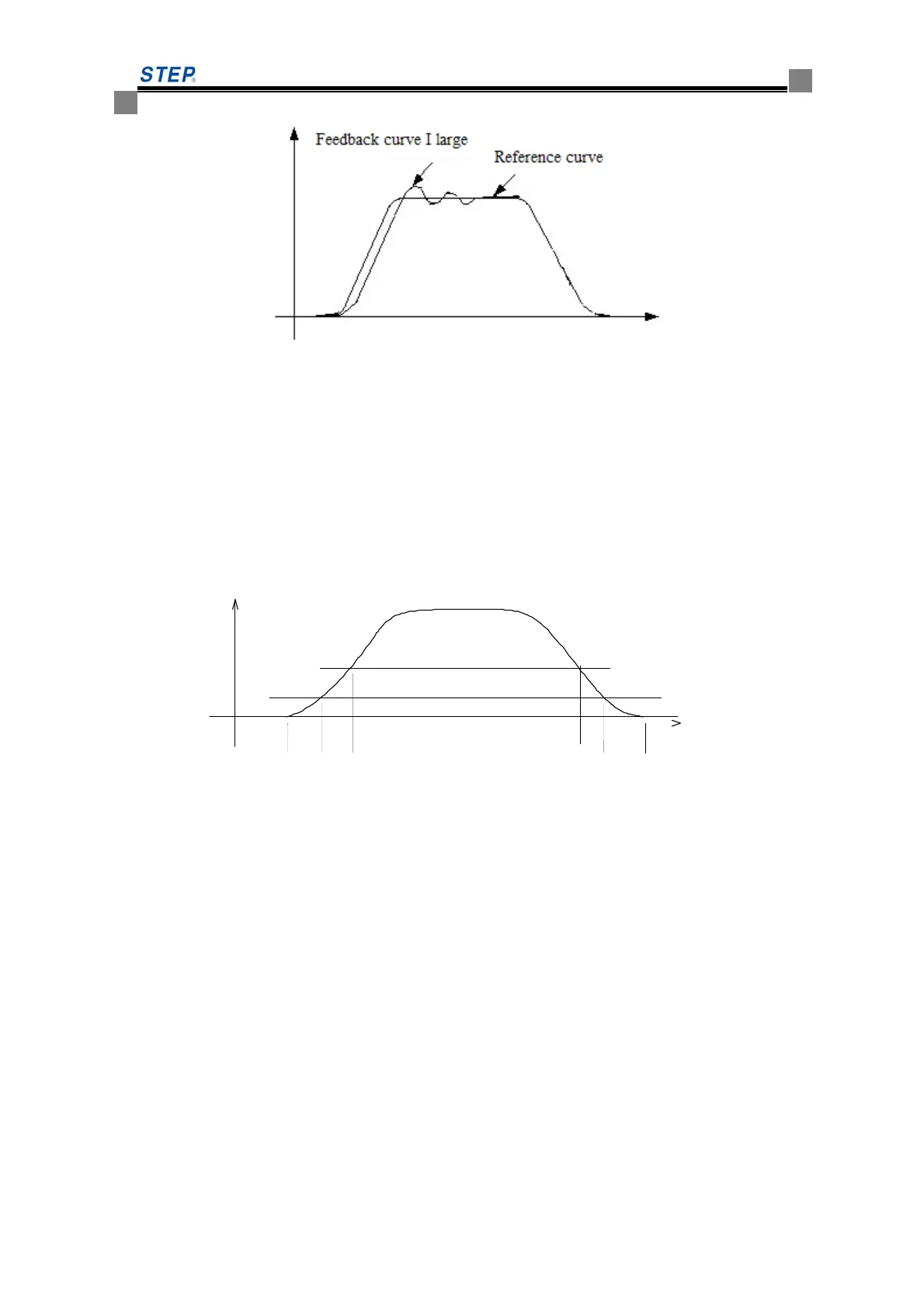
Impact of I (Integral Constant) on the Feedback Tracking
Similarly, increasing the differential constant D can increase the sensitivity of the system.
However, if D is too large, the system will be too sensitive and cause oscillation.
In the adjustment of PID regulator parameters, it is usually to adjust the proportional
constant P first. Under the premise of system not oscillated, maximize the P value, and then
adjust the integral constant I, so that the system has both fast response and little overshoot. Only
when the adjustment results of P and I are not satisfactory, adjust the D value.
The segment of the PID regulator in Elevator operation curve is as shown in Diagram 8.3
below.
Diagram 8.3 Elevator operation curve segment PI control chart
Seen from the figure above, the PID regulator of this inverter is adjusted in three different
speed sections, which facilitate the commissioning work. In case of poor comfort effect in
high-speed section, it will be enough to adjust PID parameters in high speed section, which has
little impact on the other two sections. Similarly, in case of poor comfort effect in medium and
low-speed sections, it will be enough to adjust the corresponding PID parameters. Because
different sections require different PID parameters to achieve the best comfort, adjusting PID
values by sections can make each speed section gain their best effect.
3) Adjust Elevator Operation Curve
The shape of elevator operation curve will also directly affect the comfort of elevator. In
order to satisfy passengers’ requirements for comfort and operational efficiency, the elevator
should run according to the S-curve as shown in Diagram 8.4. The system can adjust the
acceleration / deceleration slopes of the S curve and time constant at the four corners to ensure the
comfort and operational efficiency of the elevator. The main parameters that may affect the curve
are as follows.
V
P0
I0
P1
P2 P3 P1P2
I1 I2
I3
I1I2
D0
D1
D1D2 D2D3
t
Low speedMedium speed
Switching frequency1
Switching frequency 0
Zero
speed
Low
speed
Medium
speed
¸high speed
 Loading...
Loading...