020814.02 59
Installation manual BOW PRO Series Thruster: BOWB285 - BOWB300 - BOWB320
attenzione
La coppia di serraggio dei bulloni sul regolatore del motore
deve essere di massimo 10 Nm.
attenzione
Assicurarsi che la tensione indicata sulla targhetta del motore
sia identica alla tensione di alimentazione della barca.
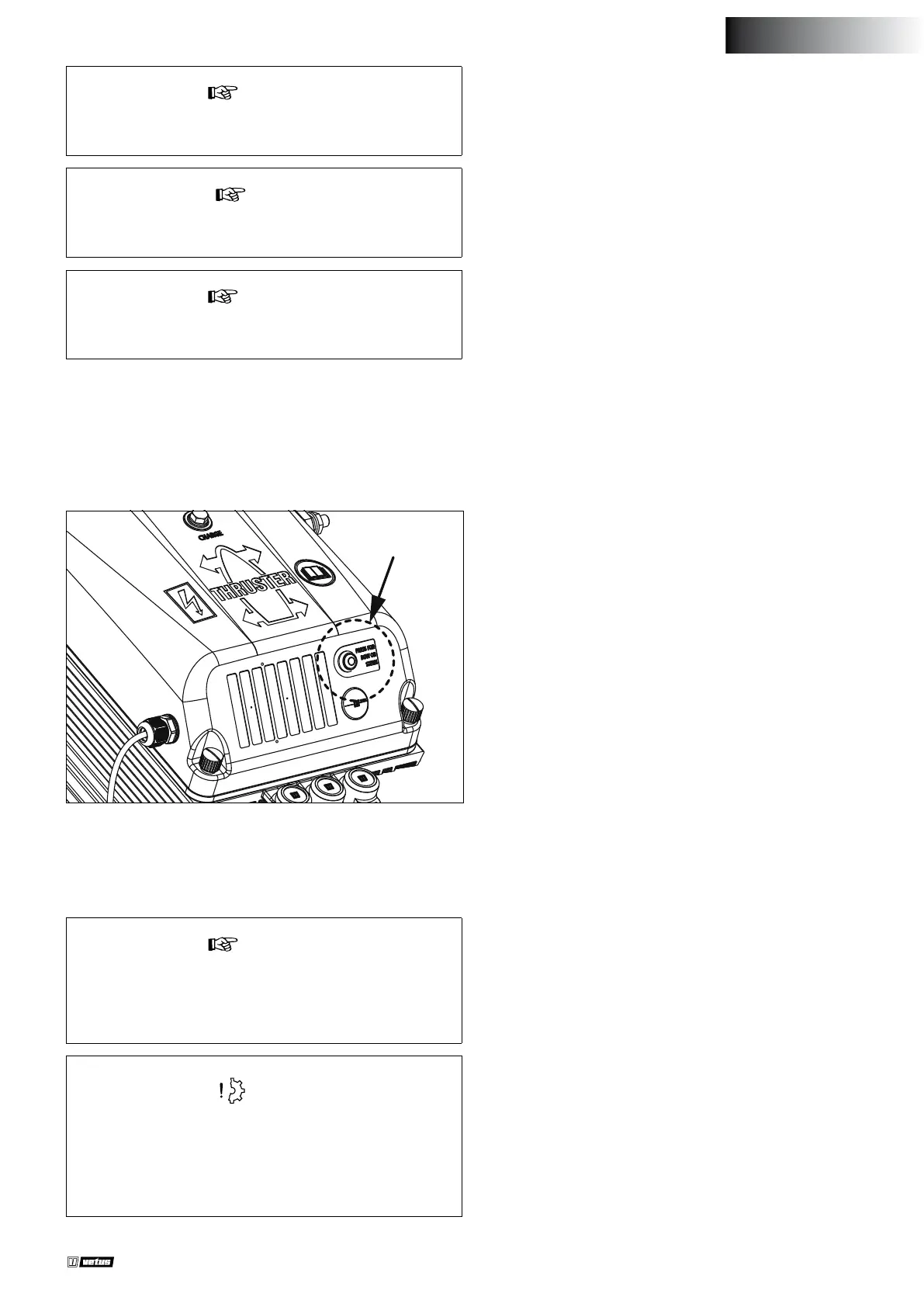
attenzione
Per poter distinguere l’elica di prua o di poppa nel CAN-bus è
necessaria una corretta configurazione.
Elica di prua
La configurazione preimpostata prevede l'installazione di un'elica di
prua.
Elica di poppa
Congurare un'elica di poppa premendo il pulsante "PRESS FOR BOW
OR STERN" sul lato inferiore del coperchio.
5.6 Collegamento dei cavi CAN bus (corrente di
controllo)
Vedere i diagrammi a partire da pagina 107 se devono essere colle-
gati più pannelli.
attenzione
L’alimentazione CAN-bus deve essere sempre collegata ad
una linea a 12 Volt (≥10 V, ≤16 V). La lunghezza massima della
linea CAN è di 40 metri. Per lunghezze maggiori, utilizzare il
ripetitore CAN VETUS (CANR).
cauteLa
Come richiesto dalle norme internazionali, tutti i conduttori
neutri (negativi) del sistema DC devono essere collegati
a un punto centrale. Questo previene non solo situazioni
pericolose e problemi di corrosione, ma anche messaggi di
errore nel sistema CAN bus.
ITALIANO
6 Risoluzione dei problemi
Si prega di notare che queste istruzioni sono generali. Le azioni spe-
ciche possono dierire da un modello all’altro.
Laddove il sistema non funzioni correttamente, controllare e se ne-
cessario modicare le seguenti voci.
6.1 Sistema CAN bus
• L’alimentazione è accesa?
• La tensione di alimentazione del CAN bus è corretta? (=12VDC).
• Il pannello di controllo si accende?
• Entrambe le resistenze di terminazione sono posizionate corret-
tamente?
Nota: L’alimentazione del CAN bus è dotata di una resistenza di
terminazione integrata.
• Tutti i connettori hanno emesso un “click” quando sono stati inse-
riti nel punto di connessione?
• Sono stati utilizzati cavi CAN bus corretti e in buone condizioni?
• Sono stati utilizzati connettori CAN bus corretti e in buone con-
dizioni?
• La lunghezza totale della rete CAN bus è inferiore ai 40 metri?
• Ciascun «nodo» è collegato all’alimentazione? Controllare mi-
surando la tensione delle 2 spine poste una di fronte l’altra sul
connettore nel nodo (spina 1=12 VDC positivo, spina 3=12 VDC
neutro).
6.2 Installazione del propulsore
• L’alimentazione della batteria è accesa?
• La tensione di alimentazione del propulsore è corretta? (Misurare
la tensione sui terminali del controller del motore).
• Il propulsore è correttamente congurato? (Elica di prua o di pop-
pa).
• I cavi positivo e neutro hanno il giusto diametro e la giusta lun-
ghezza?
• I cavi positivo e neutro sono entrambi collegati ai corretti termina-
li sul controllore del motore del propulsore?
• I cavi positivo e neutro sono condotti correttamente? Se condotti
in modo errato i cavi possono generare pressione sul circuito pro-
vocando malfunzionamenti.
• Il capocorda premuto del cavo neutro è isolato dai collegamenti
del motore vicino? (Distanziale installato?)
Nota: Non applicabile a eliche di prua con connessioni cavo esterne.
• I pressacavi dei cavi di alimentazione sono stati saldamente stretti?
• Il connettore bianco del sensore termico del motore è collegato
correttamente al circuito sotto il pannello superiore?
• Il fusibile (5 A) del controller del motore è al suo posto?
• Il connettore che va dal circuito del pannello superiore no al con-
troller del motore del propulsore è stao ssato? Le spine del con-
nettore sono collegate correttamente? (Il fermo è al suo posto?)