4
Motion Parameters
4.2.1
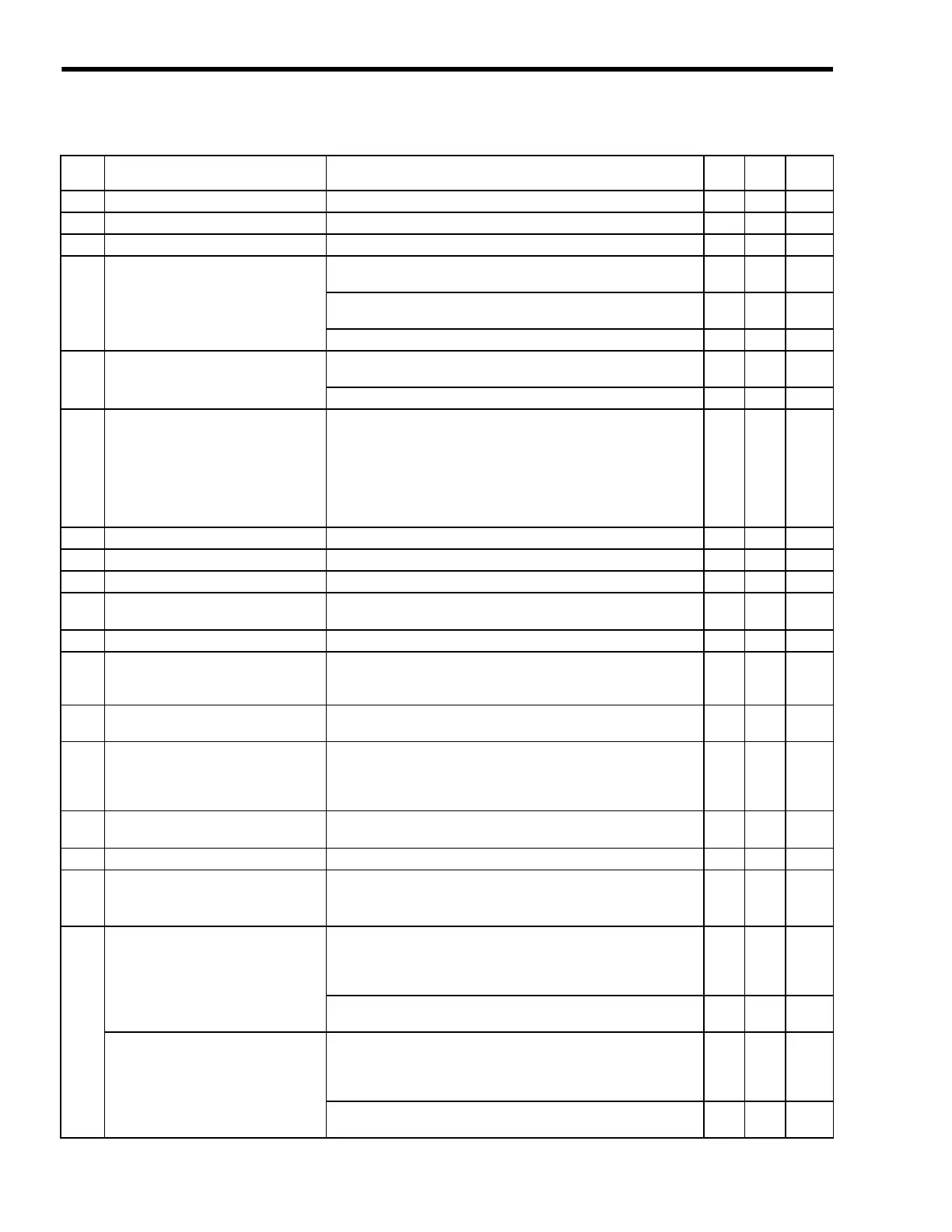
Fixed Parameter List
4-6
14
Reverse Software Limit
1 = 1 reference unit
Yes Yes
16
Backlash Compensation
1 = 1 reference unit
Yes Yes
18
−
Reserved
20
Hardware Signal 1
Bit 0: Pulse A/B Input Signal Polarity
(0: Positive logic/1: Negative logic)
Yes
Bit 1: Pulse C Input Signal Polarity
(0: Positive logic/1: Negative logic)
Yes
Bits 2 to F: Reserved
21
Hardware Signal 2
Bit 0: Deceleration Limit Switch Signal
(0: Use setting parameter/1: Use the DI signal)
Yes
Bits 1 to F: Reserved
22
Pulse Count Mode Selection
0: Sign mode (Input pulse multiplier: 1)
1: Sign mode (Input pulse multiplier: 2)
2: Up/Down mode (Input pulse multiplier: 1)
3: Up/Down mode (Input pulse multiplier: 2)
4: Pulse A/B mode (Input pulse multiplier: 1)
5: Pulse A/B mode (Input pulse multiplier: 2)
6: Pulse A/B mode (Input pulse multiplier: 4)
Yes
23
D/A Output Voltage at 100% Speed
1 = 0.001 V
Yes
24
D/A Output Voltage at 100% Torque
1 = 0.001 V
Yes
25
−
Reserved
26
A/D Input Voltage at 100% Torque
Monitor
1 = 0.001 V
Yes
27
−
Reserved
28
Servo Driver Series
0:
Σ
-I
1:
Σ
-II/
Σ
-III
2: Reserved
Yes
29
Motor Type
0: Rotary motor
1: Linear motor
Yes Yes
30
Encoder Type
0: Incremental encoder
1: Absolute encoder
2: Absolute encoder used as an incremental encoder.
3: Reserved
Yes Yes
31
Rotational Direction of Absolute
Encoder
0: Forward
1: Reverse
Yes
32
−
Reserved
34
Rated Speed (Rotary Motor or
Linear Motor)
1 = 1 min
-1
(with rotary motor)
or
1 = 0.1 m/s (with linear motor)
Yes Yes Yes
36
Encoder Resolution in Pulses/
Revolution (Rotary Motor)
1 = 1 pulse/rev
Set the value before multiplication.
Refer to ( 2 ) SVA-01 Module Fixed Parameter Settings under 3.2.4
Servo Parameter Settings for setting methods.
Yes
1 = 1 pulse/rev
Set the value before multiplication.
Yes Yes
Encoder Output Resolution per
Linear Scale Pitch (Linear Motor)
1 = 1 pulse/linear scale pitch
Set the value before multiplication.
Refer to ( 2 ) SVA-01 Module Fixed Parameter Settings under 3.2.4
Servo Parameter Settings for setting methods.
Yes
1 = 1 pulse/linear scale pitch
Set the value before multiplication.
Yes
(cont’d)
No. Name Description
SVB
-01
SVA
-01
SVR
WWW.NNC.IR