5
Motion Commands
5.2.23
Torque Reference (TRQ)
5-104
[ e ] Execution when an Alarm Occurs
5.2.23 Torque Reference (TRQ)
With the MECHATROLINK-II, the TRQ command is used to operate the SERVOPACK under the
torque control mode, enabling the same type of operation as is possible with the analog torque
reference input of the SERVOPACK.
The TRQ command is stipulated in MECHATROLINK-II command specifications and cannot be
used for MECHATROLINK-I.
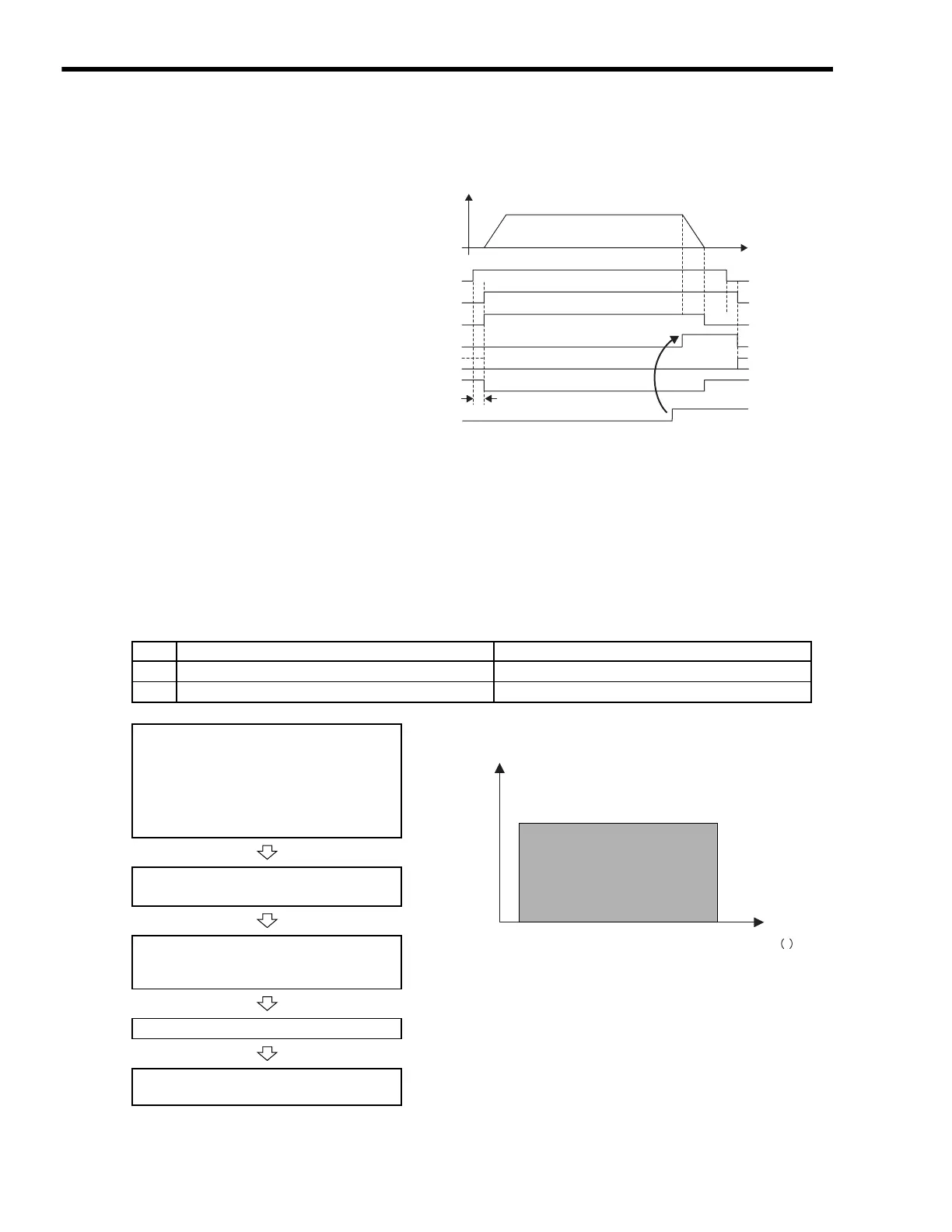
( 1 ) Operating Procedure
Alarm
1 scan
OW08 = 23 (VELO)
IW08 = 23 (VELO)
IB090 (BUSY)
IB098 (COMPLETE)
IB093 (FAIL)
IB0C0 (DEN)
No. Execution Conditions Confirmation Method
1 There are no alarms.
Both IL
02 and IL
04 are 0.
2 Motion command execution has been completed.
IW
08 is 0 and IB
090 is OFF.
Set the motion setting parameters.
• Torque Reference Setting: OL
0C
• Speed Limit Setting: OL
0E
• Acceleration/Deceleration Filter Type:
OW
03
• Speed Loop P/PI Switch: OW
01
• Position management using the position feedback is possible during
operation with torque control mode.
• The torque can be changed during operation.
• This command can be executed even when the Servo is OFF.
• The Command Pause (OB
090) cannot be used.
• Set OB
091 to 1 to abort execution.
Execute the
TRQ
motion command.
• Set OW
08 to 24.
The control mode in the SERVOPACK is
changed to torque control.
IW
08 will be 24 during execution.
Operation in torque control mode
Execute another motion command to cancel the
torque control mode.
Torque
Time
t
0
WWW.NNC.IR