5
Motion Commands
5.3.6
Monitor Status (SMON)
5-122
5.3.6 Monitor Status (SMON)
When the SMON command is executed, the data specified in Monitor 4 of the Servo User Monitor is
stored in Servo User Monitor 4 (monitoring parameter IL
34).
The following table shows the data that can be specified in the User Monitor. Refer to your
SERVOPACK manual for details on the monitored data.
This command will end with a Command Error End if it is executed with a communications method
other than MECHATROLINK-II (32 byte).
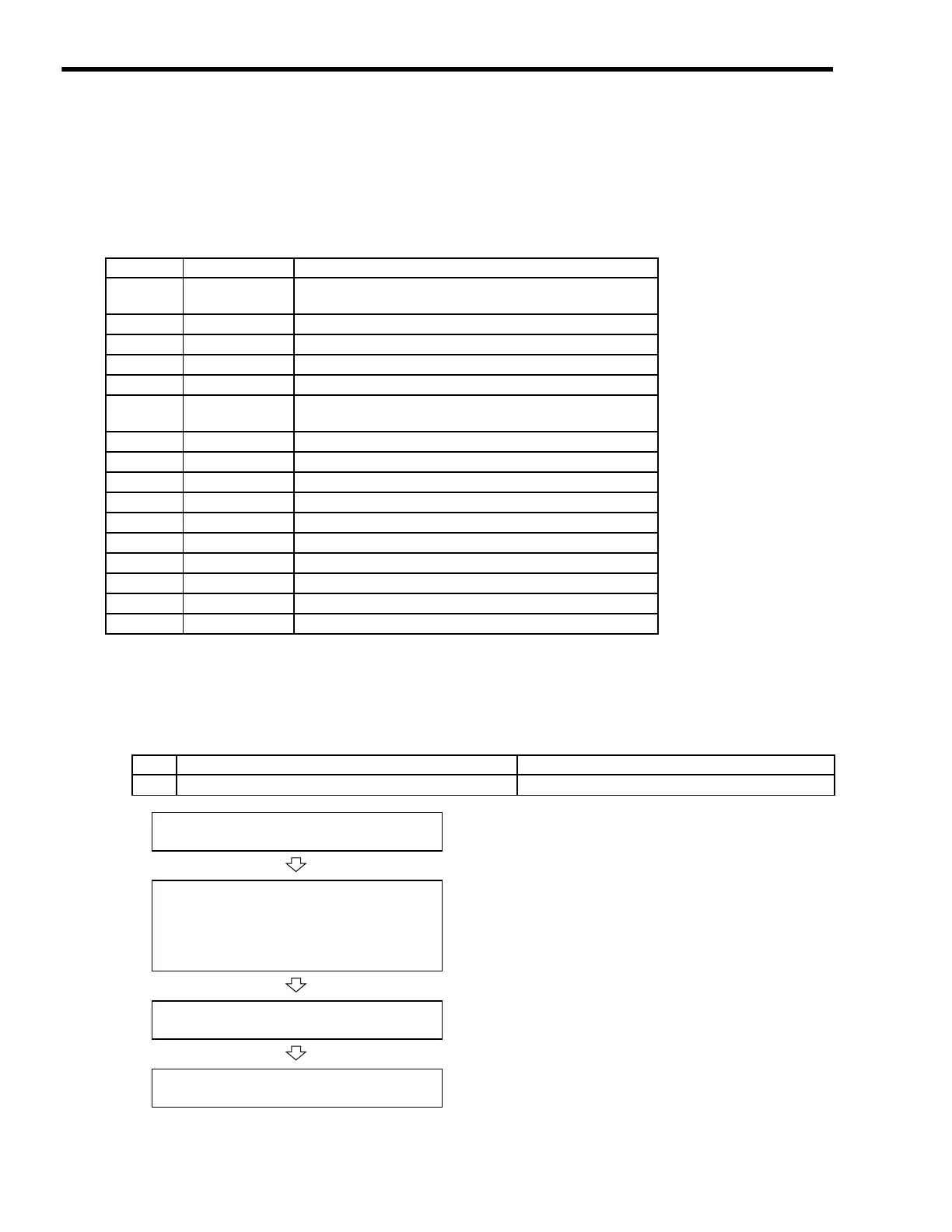
( 1 ) Operating Procedure
Set Value Name Contents
0POS
Reference coordinate system's reference position (after reference
filter)
1MPOSMachine coordinate system's reference position
2PERRFollowing error
3APOSMachine coordinate system's feedback position
4LPOSMachine coordinate system's feedback latch position
5IPOS
Reference coordinate system's reference position (before reference
filter)
6TPOSReference coordinate system's target position
7 −−
8FSPDFeedback Speed
9CSPDReference speed
ATSPDTarget speed
BTRQTorque reference (Rated torque is 100%.)
C −−
D −−
EOMN1Optional monitor 1 (Actual content set in parameters.)
FOMN2Optional monitor 2 (Actual content set in parameters.)
No. Execution Conditions Confirmation Method
1 Motion subcommand execution must be completed.
IW
0A is 0 and IB
0B0 is OFF.
Execute SMON motion subcommand.
• Set OW
0A to 3.
Reads the information managed by the Servo Driver
and stores the code in the monitoring parameter.
• IW
0A will be 3 during command execution.
• IB
0B0 will be ON during command
processing.
Monitoring is completed.
• IW
0A is 3 and IB
0B0 is OFF.
Execute NOP motion command.
• Set OW
0A to 0.
WWW.NNC.IR