5.2
Motion Command Details
5-11
( 3 ) Aborting
Axis travel can be stopped during command execution and the remaining travel cancelled by aborting
execution of a command. A command is aborted by setting the Command Abort bit (OB
091) to
1.
Set the Command Abort bit (OB
091) to 1. The axis will decelerate to a stop. When the axis has
stopped, the remain travel will be canceled and the Positioning Completed bit (IB
01C) will turn
ON.
This type of operation will also be performed if the motion command is changed during axis
movement.
( 4 ) Related Parameters
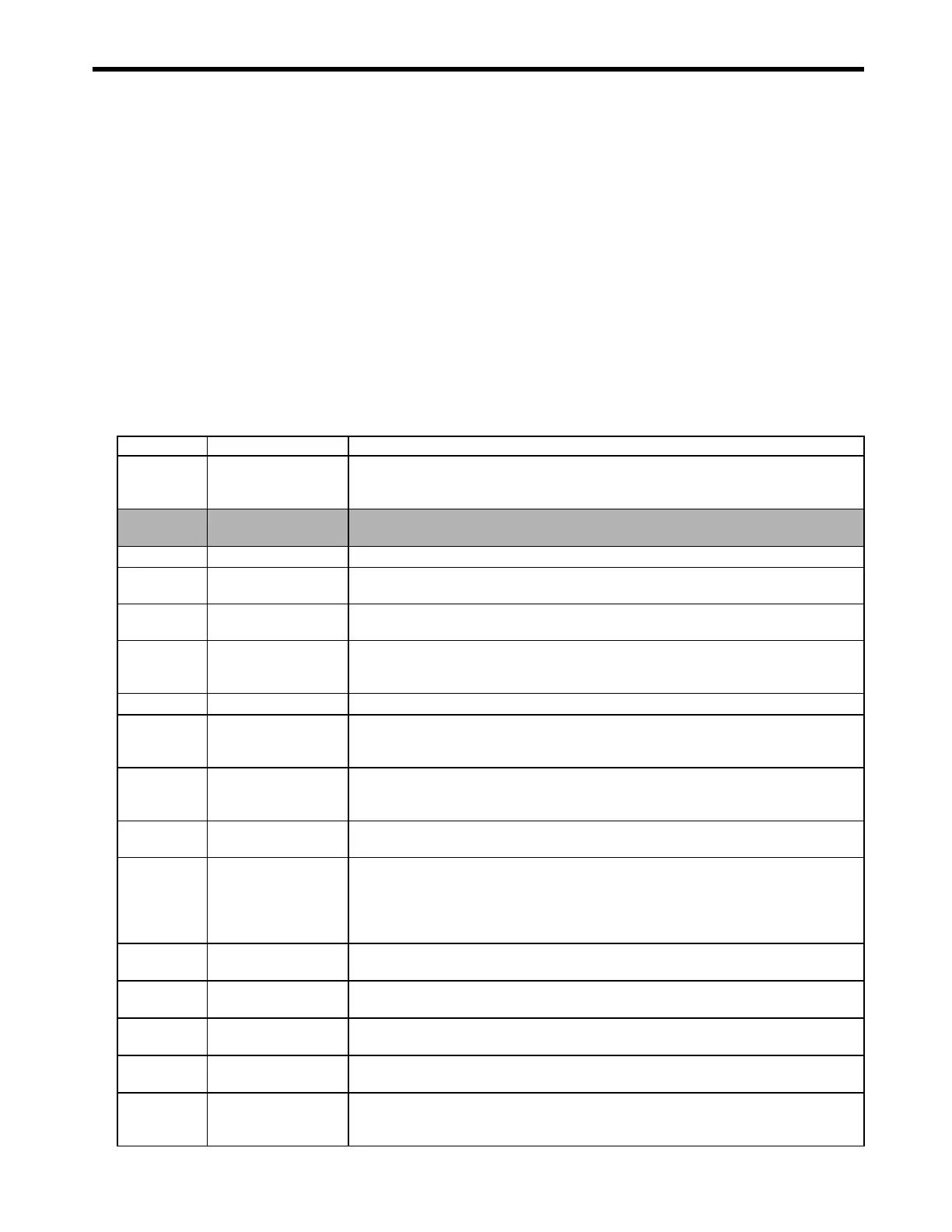
[ a ] Setting Parameters
Parameter Name Setting
OB
000
Servo ON
Turn the power to the Servomotor ON and OFF.
1: Power ON to Servomotor, 0: Power OFF to Servomotor
Turn ON the power before setting the Motion Command (OW
08) to 2.
OB
013
Speed Loop
P/PI Switch
Switch the speed control loop between PI control and P control.
0: PI control, 1: P control
OW
03
Function 1
Set the speed unit, acceleration/deceleration unit, and filter type.
OW
04
Function 2
Set the external positioning signal.
2: phase-C pulse, 3: /EXT1, 4: /EXT2, 5: /EXT3
OW
08
Motion Command
The positioning starts when this parameter is set to 2. The operation will be canceled if this
parameter is set to 0 during EX_POSING command execution.
OB
090
Command Pause
The axis will decelerate to a stop if this bit is set to 1 during execution of EX_POSING
command execution. The positioning will restart if this bit is reset to 0 when a command is
being held.
OB
091
Command Abort
The axis will decelerate to a stop if this bit is set to 1 during EX_POSING command execution.
OB
094
Latch Zone Enabled
Enable or disable the area where the external positioning signal is valid. If the latch zone is
enabled, the external positioning signal will be ignored if it is input outside of the latch zone.
0: Disable, 1: Enable
OB
095
Position Reference
Type
Switch the type of position reference.
0: Incremental addition mode, 1: Absolute mode
Set this parameter before setting the Motion Command (OW
08) to 2.
OL
10
Speed Reference
Specify the speed for the positioning. This setting can be changed during operation. The unit
depends on the setting of OW
03.
OL
18
Speed Override
This parameter allows the positioning speed to be changed without changing the Speed
Reference (OL
10). Set the speed as a percentage of the Speed Reference Setting. This
setting can be changed during operation.
Setting range: 0 to 32767 (0% to 327.67%) Setting unit: 1 = 0.01%
Example: Setting for 50%: 5000
OL
1C
Position Reference
Setting
Set the target position for positioning. This setting can be changed during operation. The
meaning of the setting depends on the status of OB
095.
OL
1E
Positioning
Completed Width
Set the width in which to turn ON the Positioning Completed bit (IB
0C1).
OL
2A
Latch Zone Lower
Limit
Set the boundary in the negative direction of the area in which the external positioning signal is
to be valid.
OL
2C
Latch Zone Upper
Limit
Set the boundary in the positive direction of the area in which the external positioning signal is
to be valid.
OL
20
Positioning
Completed Width 2
Set the range in which the Position Proximity bit (IB
0C3) will turn ON. The Position
Proximity bit will turn ON when the absolute value of the difference between the reference
position and the feedback position is less than the value set here.
WWW.NNC.IR