6 MECHATROLINK II Communications
6.3.29 Homing (ZRET: 3AH)
6-36
6.3.29 Homing (ZRET: 3AH)
Note: Refer to 5.3 I/O Signal Connections.
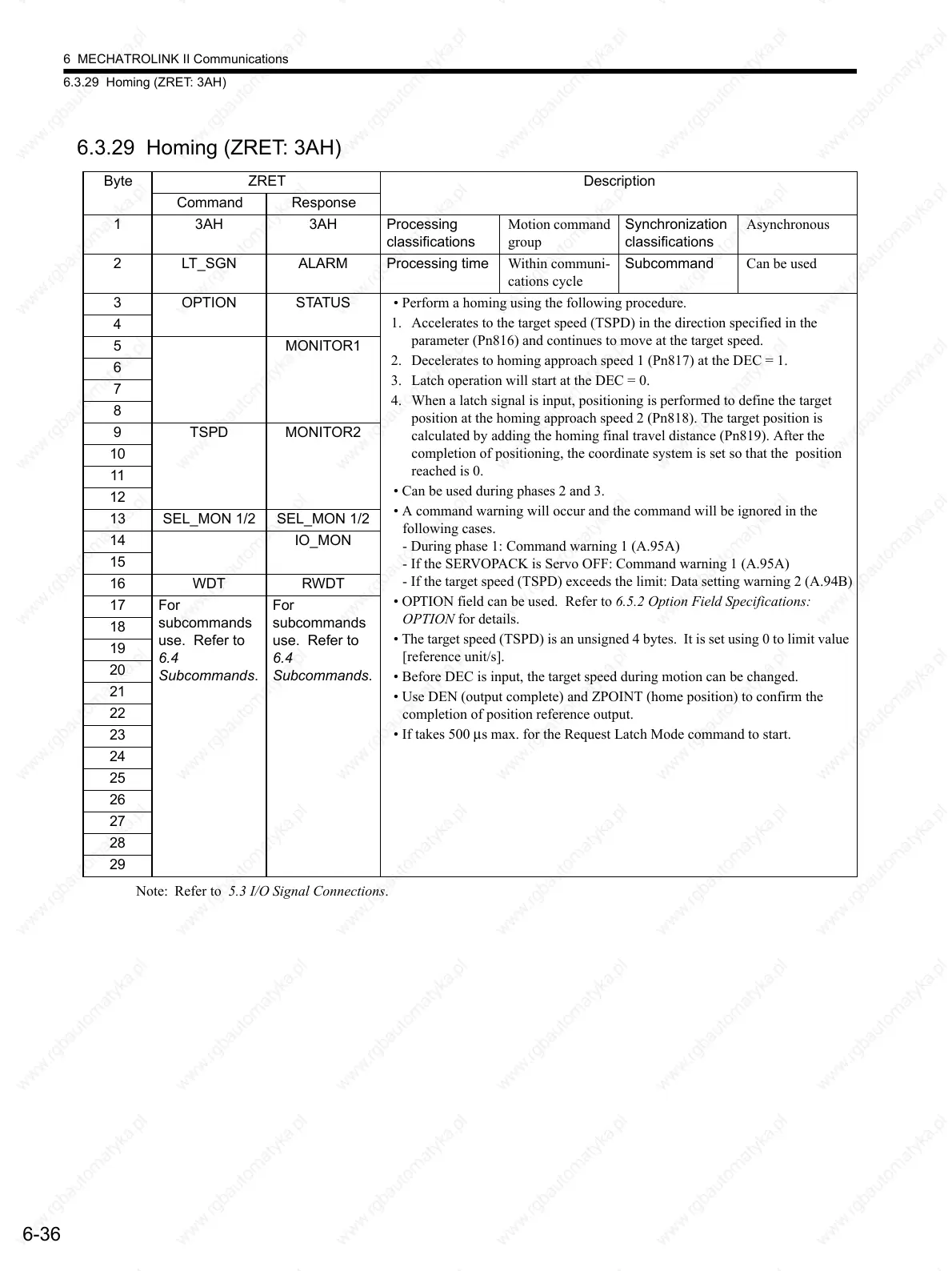
Byte ZRET Description
Command Response
1 3AH 3AH Processing
classifications
Motion command
group
Synchronization
classifications
Asynchronous
2 LT_SGN ALARM Processing time Within communi-
cations cycle
Subcommand Can be used
3 OPTION STATUS • Perform a homing using the following procedure.
1. Accelerates to the target speed (TSPD) in the direction specified in the
parameter (Pn816) and continues to move at the target speed.
2. Decelerates to homing approach speed 1 (Pn817) at the DEC = 1.
3. Latch operation will start at the DEC = 0.
4. When a latch signal is input, positioning is performed to define the target
position at the homing approach speed 2 (Pn818). The target position is
calculated by adding the homing final travel distance (Pn819). After the
completion of positioning, the coordinate system is set so that the position
reached is 0.
• Can be used during phases 2 and 3.
• A command warning will occur and the command will be ignored in the
following cases.
- During phase 1: Command warning 1 (A.95A)
- If the SERVOPACK is Servo OFF: Command warning 1 (A.95A)
- If the target speed (TSPD) exceeds the limit: Data setting warning 2 (A.94B)
• OPTION field can be used. Refer to 6.5.2 Option Field Specifications:
OPTION for details.
• The target speed (TSPD) is an unsigned 4 bytes. It is set using 0 to limit value
[reference unit/s].
• Before DEC is input, the target speed during motion can be changed.
• Use DEN (output complete) and ZPOINT (home position) to confirm the
completion of position reference output.
• If takes 500 µs max. for the Request Latch Mode command to start.
4
5 MONITOR1
6
7
8
9 TSPD MONITOR2
10
11
12
13 SEL_MON 1/2 SEL_MON 1/2
14 IO_MON
15
16 WDT RWDT
17 For
subcommands
use. Refer to
6.4
Subcommands.
For
subcommands
use. Refer to
6.4
Subcommands.
18
19
20
21
22
23
24
25
26
27
28
29
 Loading...
Loading...

