8 Adjustments
8.2.4 Machine Rigidity Setting for Normal Autotuning
8-10
8.2.4 Machine Rigidity Setting for Normal Autotuning
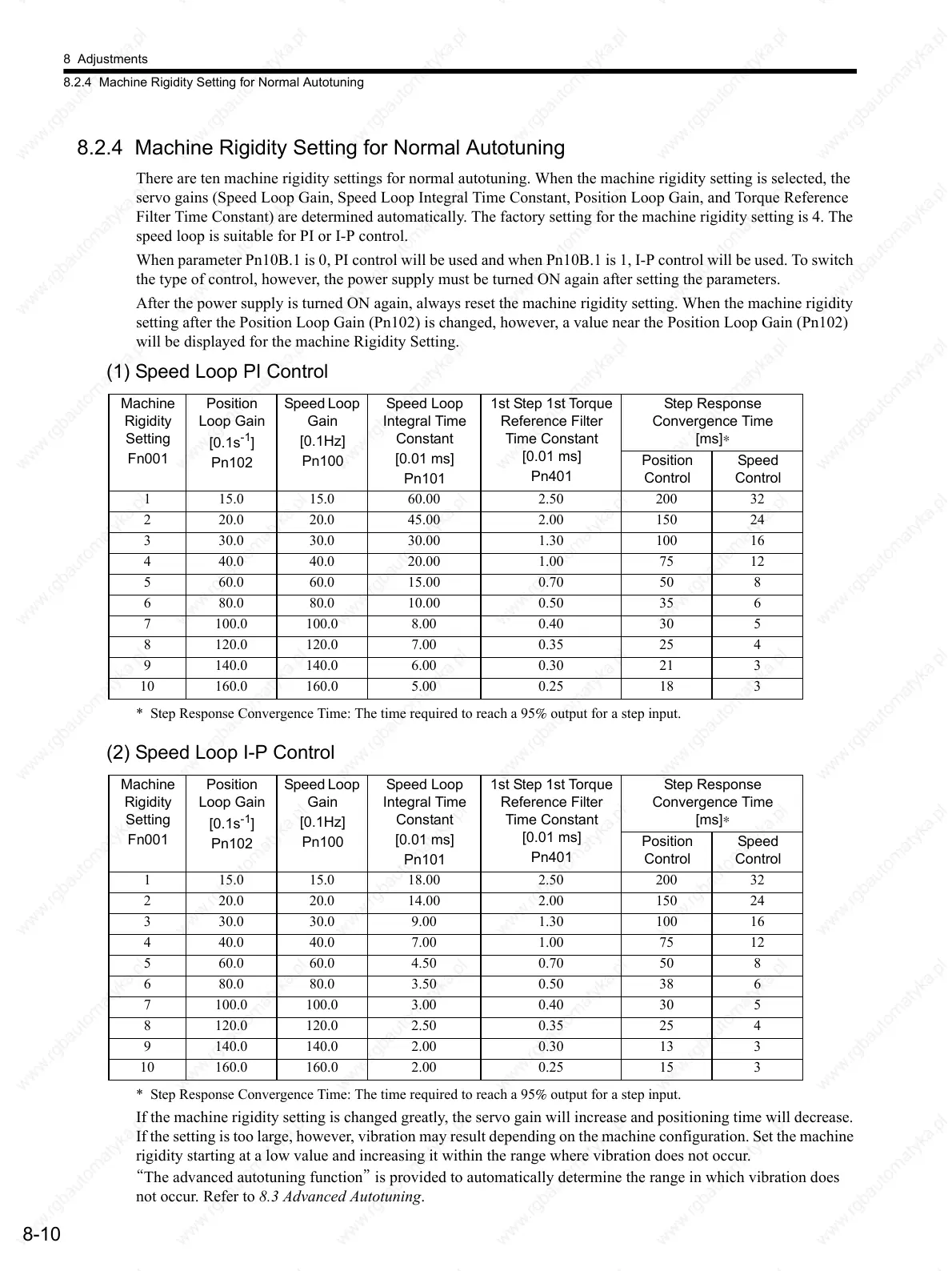
There are ten machine rigidity settings for normal autotuning. When the machine rigidity setting is selected, the
servo gains (Speed Loop Gain, Speed Loop Integral Time Constant, Position Loop Gain, and Torque Reference
Filter Time Constant) are determined automatically. The factory setting for the machine rigidity setting is 4. The
speed loop is suitable for PI or I-P control.
When parameter Pn10B.1 is 0, PI control will be used and when Pn10B.1 is 1, I-P control will be used. To switch
the type of control, however, the power supply must be turned ON again after setting the parameters.
After the power supply is turned ON again, always reset the machine rigidity setting. When the machine rigidity
setting after the Position Loop Gain (Pn102) is changed, however, a value near the Position Loop Gain (Pn102)
will be displayed for the machine Rigidity Setting.
(1) Speed Loop PI Control
* Step Response Convergence Time: The time required to reach a 95% output for a step input.
(2) Speed Loop I-P Control
* Step Response Convergence Time: The time required to reach a 95% output for a step input.
If the machine rigidity setting is changed greatly, the servo gain will increase and positioning time will decrease.
If the setting is too large, however, vibration may result depending on the machine configuration. Set the machine
rigidity starting at a low value and increasing it within the range where vibration does not occur.
“The advanced autotuning function” is provided to automatically determine the range in which vibration does
not occur. Refer to 8.3 Advanced Autotuning.
Machine
Rigidity
Setting
Fn001
Position
Loop Gain
[0.1s
-1
]
Pn102
Speed Loop
Gain
[0.1Hz]
Pn100
Speed Loop
Integral Time
Constant
[0.01 ms]
Pn101
1st Step 1st
Torque
Reference Filter
Time Constant
[0.01 ms]
Pn401
Step Response
Convergence Time
[ms]∗
Position
Control
Speed
Control
1 15.0 15.0 60.00 2.50 200 32
2 20.0 20.0 45.00 2.00 150 24
3 30.0 30.0 30.00 1.30 100 16
4 40.0 40.0 20.00 1.00 75 12
5 60.0 60.0 15.00 0.70 50 8
6 80.0 80.0 10.00 0.50 35 6
7 100.0 100.0 8.00 0.40 30 5
8 120.0 120.0 7.00 0.35 25 4
9 140.0 140.0 6.00 0.30 21 3
10 160.0 160.0 5.00 0.25 18 3
Machine
Rigidity
Setting
Fn001
Position
Loop Gain
[0.1s
-1
]
Pn102
Speed Loop
Gain
[0.1Hz]
Pn100
Speed Loop
Integral Time
Constant
[0.01 ms]
Pn101
1st Step 1st Torque
Reference Filter
Time Constant
[0.01 ms]
Pn401
Step Response
Convergence Time
[ms]∗
Position
Control
Speed
Control
1 15.0 15.0 18.00 2.50 200 32
2 20.0 20.0 14.00 2.00 150 24
3 30.0 30.0 9.00 1.30 100 16
4 40.0 40.0 7.00 1.00 75 12
5 60.0 60.0 4.50 0.70 50 8
6 80.0 80.0 3.50 0.50 38 6
7 100.0 100.0 3.00 0.40 30 5
8 120.0 120.0 2.50 0.35 25 4
9 140.0 140.0 2.00 0.30 13 3
10 160.0 160.0 2.00 0.25 15 3
 Loading...
Loading...

