7.4 Settings According to Host Controller
7-21
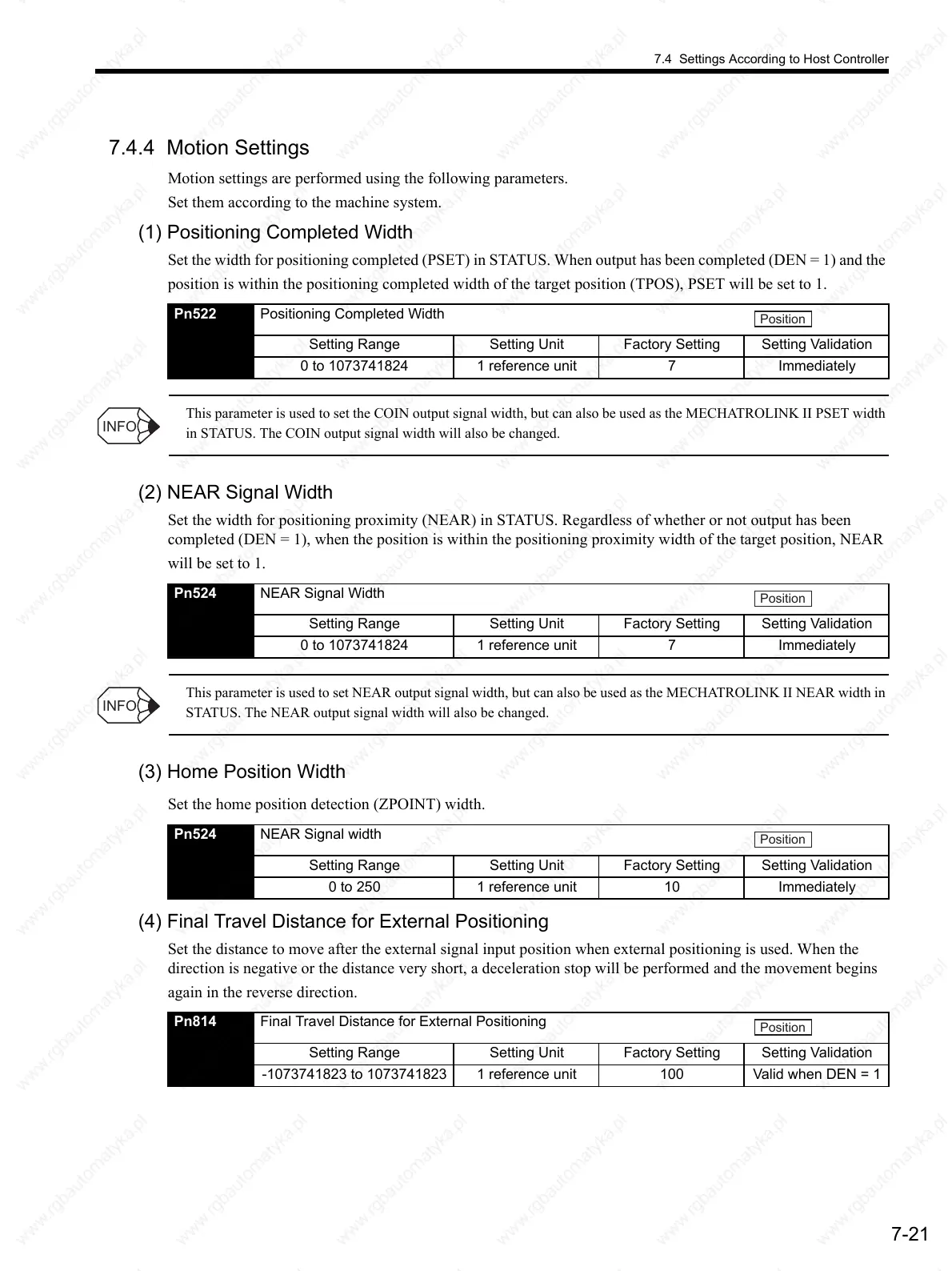
7.4.4 Motion Settings
Motion settings are performed using the following parameters.
Set them according to the machine system.
(1) Positioning Completed Width
Set the width for positioning completed (PSET) in STATUS. When output has been completed (DEN = 1) and the
position is within the positioning completed width of the target position (TPOS), PSET will be set to 1.
This parameter is used to set the COIN output signal width, but can also be used as the MECHATROLINK II PSET width
in STATUS. The COIN output signal width will also be changed.
(2) NEAR Signal Width
Set the width for positioning proximity (NEAR) in STATUS. Regardless of whether or not output has been
completed (DEN = 1), when the position is within the positioning proximity width of the target position, NEAR
will be set to 1.
This parameter is used to set NEAR output signal width, but can also be used as the MECHATROLINK II NEAR width in
STATUS. The NEAR output signal width will also be changed.
(3) Home Position Width
Set the home position detection (ZPOINT) width.
(4) Final Travel Distance for External Positioning
Set the distance to move after the external signal input position when external positioning is used. When the
direction is negative or the distance very short, a deceleration stop will be performed and the movement begins
again in the reverse direction.
Pn522 Positioning Completed Width
Setting Range Setting Unit Factory Setting Setting Validation
0 to 1073741824 1 reference unit 7 Immediately
Position
INFO
Pn524 NEAR Signal Width
Setting Range Setting Unit Factory Setting Setting Validation
0 to 1073741824 1 reference unit 7 Immediately
Position
INFO
Pn524 NEAR Signal width
Setting Range Setting Unit Factory Setting Setting Validation
0 to 250 1 reference unit 10 Immediately
Position
Pn814 Final Travel Distance for External Positioning
Setting Range Setting Unit Factory Setting Setting Validation
-1073741823 to 1073741823 1 reference unit 100 Valid when DEN = 1
Position
 Loading...
Loading...

