6 MECHATROLINK II Communications
6.5.2 Option Field Specifications: OPTION
6-50
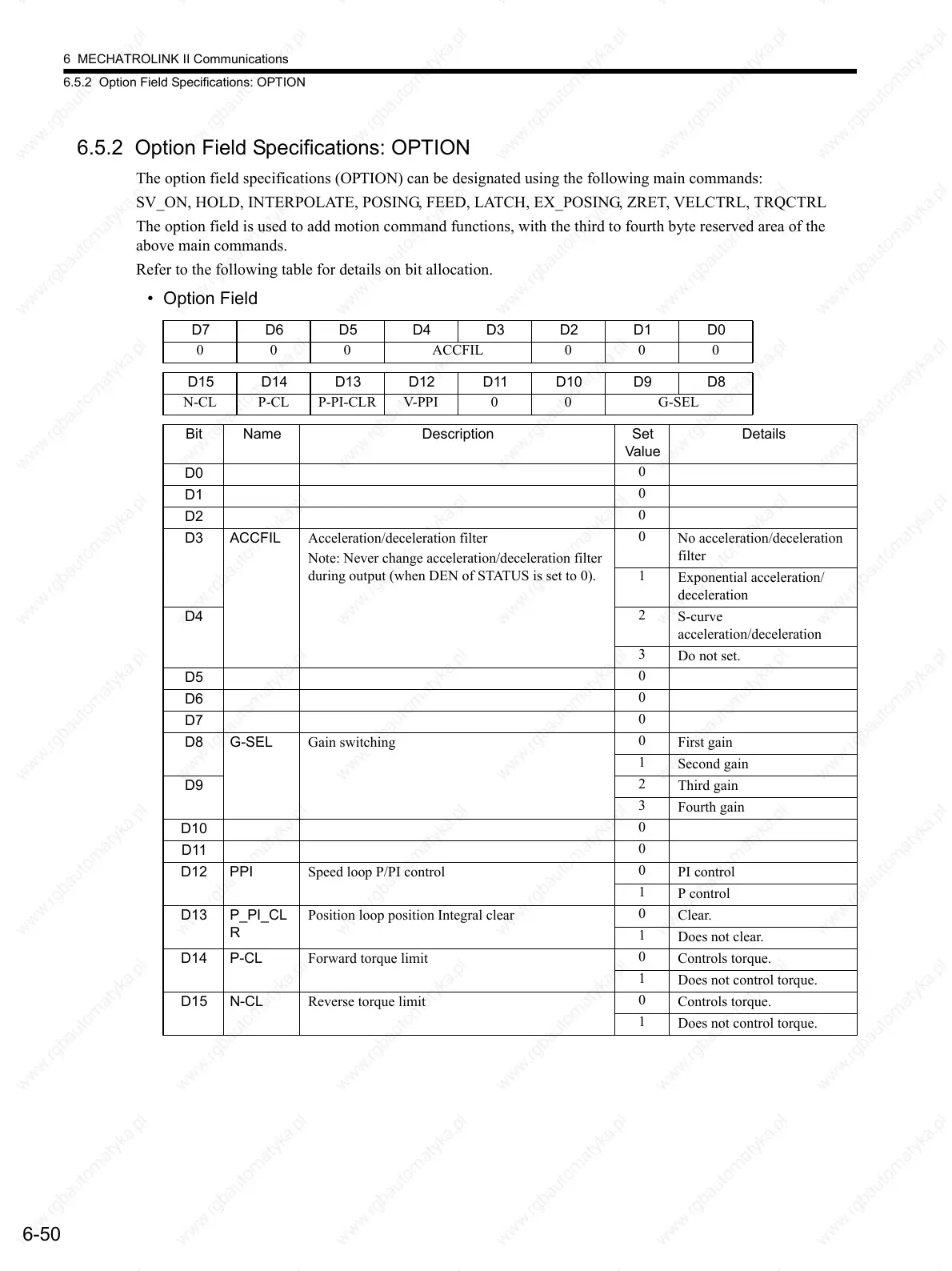
6.5.2 Option Field Specifications: OPTION
The option field specifications (OPTION) can be designated using the following main commands:
SV_ON, HOLD, INTERPOLATE, POSING, FEED, LATCH, EX_POSING, ZRET, VELCTRL, TRQCTRL
The option field is used to add motion command functions, with the third to fourth byte reserved area of the
above main commands.
Refer to the following table for details on bit allocation.
• Option Field
D7 D6 D5 D4 D3 D2 D1 D0
000 ACCFIL 000
D15 D14 D13 D12 D11 D10 D9 D8
N-CL P-CL P-PI-CLR V-PPI 0 0 G-SEL
Bit Name Description Set
Value
Details
D0
0
D1
0
D2
0
D3 ACCFIL Acceleration/deceleration filter
Note: Never change acceleration/deceleration filter
during output (when DEN of STATUS is set to 0).
0
No acceleration/deceleration
filter
1
Exponential acceleration/
deceleration
D4
2
S-curve
acceleration/deceleration
3
Do not set.
D5
0
D6
0
D7
0
D8 G-SEL Gain switching
0
First gain
1
Second gain
D9
2
Third gain
3
Fourth gain
D10
0
D11
0
D12 PPI Speed loop P/PI control
0
PI control
1
P control
D13 P_PI_CL
R
Position loop position Integral clear
0
Clear.
1
Does not clear.
D14 P-CL Forward torque limit
0
Controls torque.
1
Does not control torque.
D15 N-CL Reverse torque limit
0
Controls torque.
1
Does not control torque.
 Loading...
Loading...

